Fonctionnement d'un robot en interaction avec un second robot dit "esclave"
Attention :
Les robots haptiques à disposition sont fragiles. Ne pas faire de mouvement trop brusque et limiter l'amplitude des mouvements.
Positionner les 2 robots haptiques non instrumentés côte-à-côte.
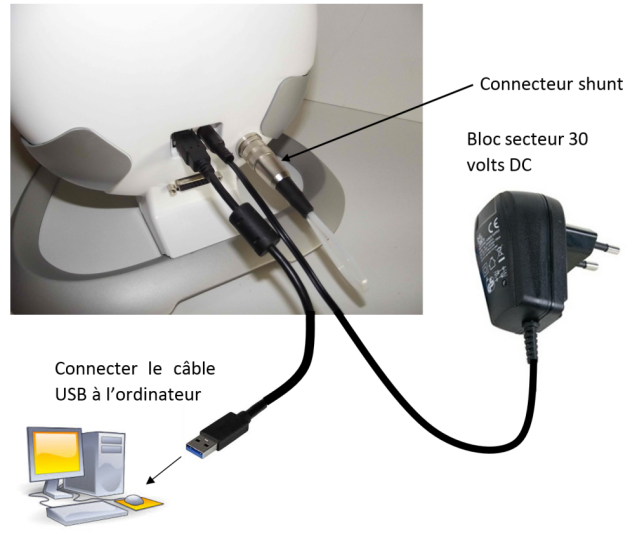
Les brancher, chacun comme l'image ci-dessous, en utilisant un connecteur shunt, un bloc secteur 30V et un câble USB pour chaque robot haptique.
Lancer le logiciel Falcon_master_slave.
Ce dernier permet de découvrir le fonctionnement en télé-robotique. Les déplacements du robot maître imposeront la consigne de position du robot esclave dont les moteurs sont gérés par un asservissement de position.
Effectuer les opérations demandées à l'écran (sélection du robot maître et initialisation de chaque robot). Les robots haptiques doivent être de couleur bleu (et non rouge) signalant ainsi que leurs codeurs sont initialisés.
Puis, manipuler l'effecteur (la boule blanche avec des boutons) du robot haptique maître.
Attention :
Ne pas bloquer les mouvements du robot haptique esclave !