Les 3 chaînes de puissance indépendantes
Le robot haptique possède une architecture mécanique de type robot parallèle. La manette est reliée à 3 parallélogrammes déformables, chacun relié à un bras.
Ces trois sous-systèmes, dit "axe", sont décalés d'un angle de 120°.
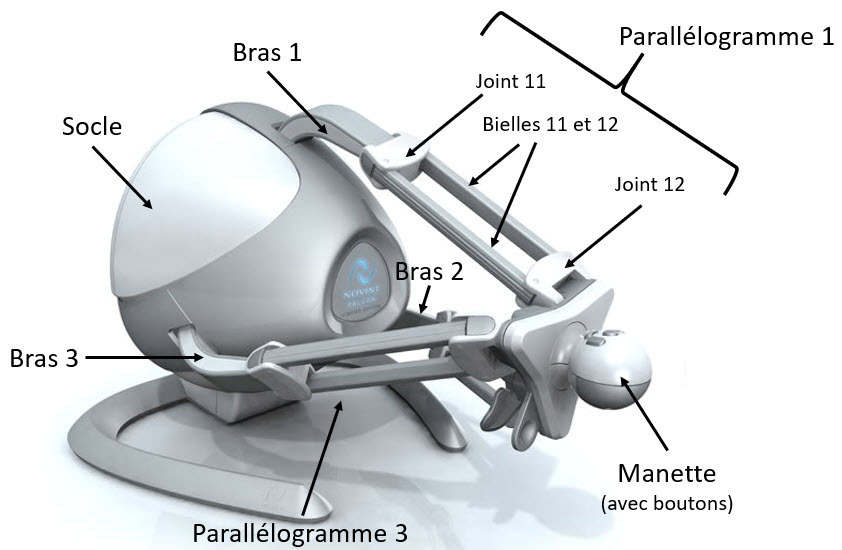
Ce système se caractérise donc par 3 chaînes de puissance indépendantes, et identiques (une pour chaque axe), utiles pour le positionnement de la manette /socle.
Principe d'une chaîne de puissance pour l'activité "déployer un axe"
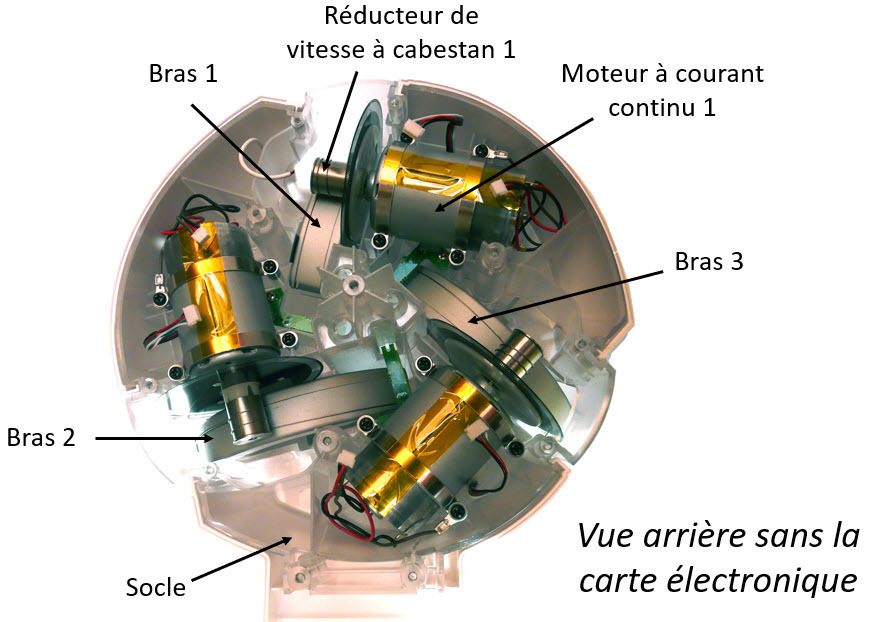
La chaîne de puissance de chaque axe est constituée principalement de : une alimentation 220V AC - 30 V CC + un hacheur - pont de puissance MLI (pré-actionneur) + un moteur à courant continu + un réducteur de vitesse à cabestan + un transformateur de mouvement bielles/bras (bras et parallélogramme).
Ci-dessous les moteurs à courant continu et réducteurs de vitesse à cabestan de chaque axe.
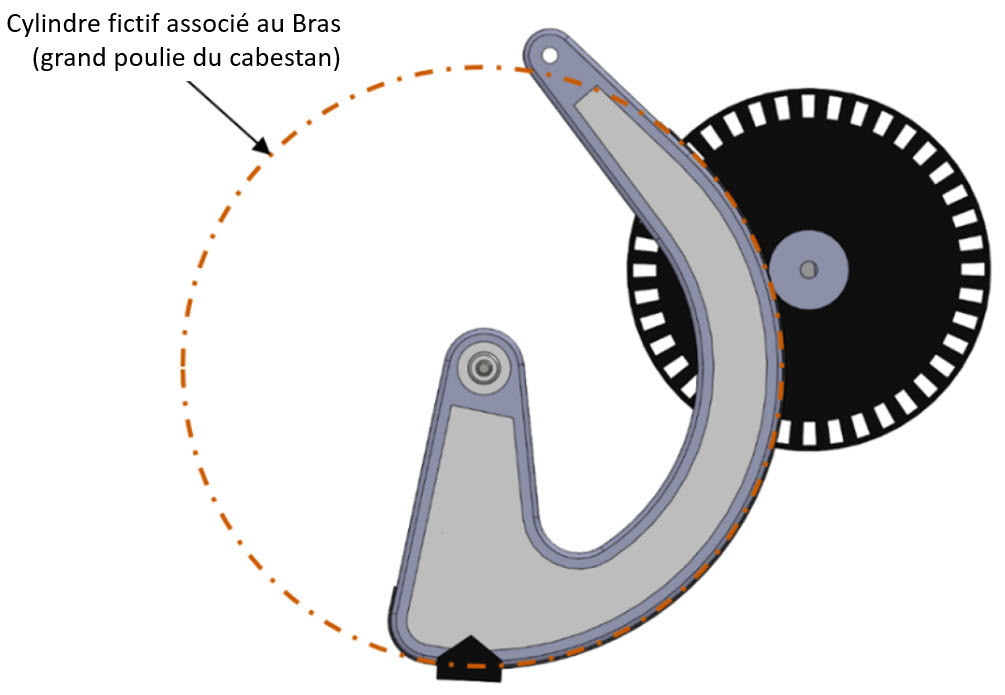
Réducteur de vitesse à cabestan
Un réducteur de vitesse à cabestan est un poulies-courroie à courroie croisée.
La petite poulie est appelée cabestan.
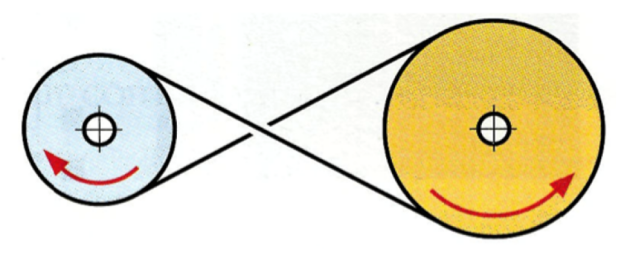
Dans le robot haptique :
la petite poulie (le cabestan) est un simple cylindre solidaire du rotor du moteur ;
la grande poulie est une portion de cylindre correspondant à la surface extérieure cylindrique du bras ;
la courroie est remplacée par un câble en acier. Il est partiellement enroulé sur la grande poulie (le bras) et fixé à ses 2 extrémités sur ce même bras. Il fait plusieurs tours de la petite poulie (cabestan) afin d'assurer le non glissement du câble sur le cabestan.

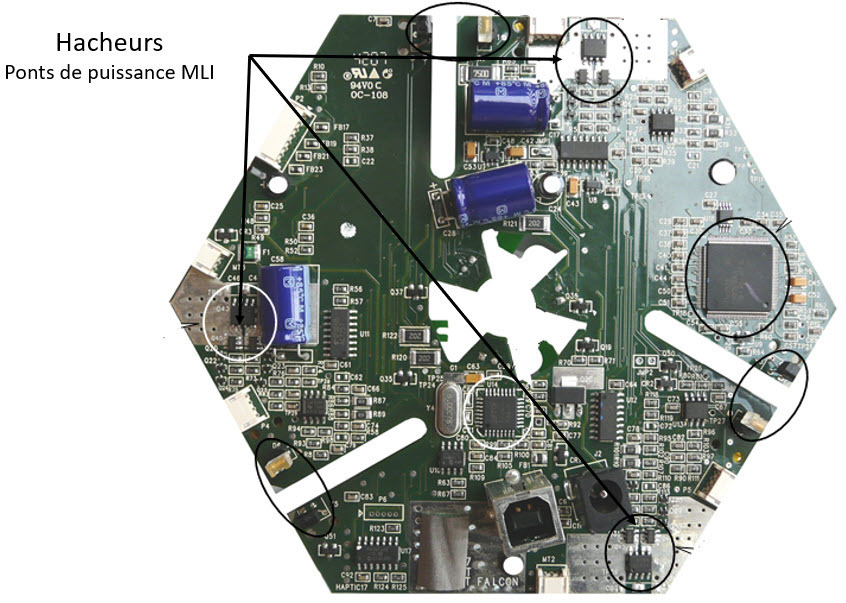
Hacheur - Pont de puissance MLI
Les hacheurs sont positionnés sur la carte électronique.