Introduction
Soit à accoupler deux organes dans une chaîne cinématique, par exemple un moteur et un réducteur. Les deux éléments s’achètent séparément dans le commerce. Pour pouvoir les assembler et transmettre le mouvement entre eux, il faut que l’arbre moteur et l’arbre récepteur soient parfaitement alignés (contraintes de coaxialité entre l’arbre moteur et l’arbre récepteur).
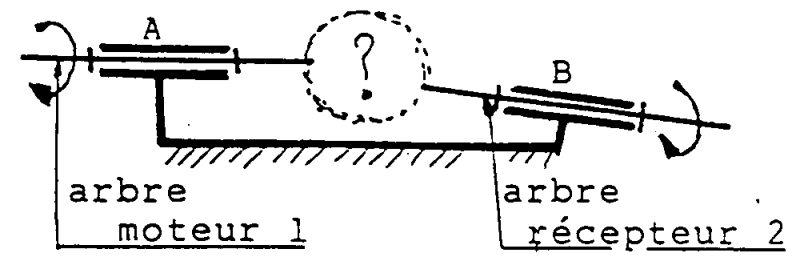
Le problème posé lors de l'accouplement d'arbres est de transmettre une puissance P entre deux arbres rapprochés (1) et (2) sans créer de contraintes excessives sur les arbres (flexion) et sur les paliers (A et B). En effet, il est très compliqué d’assurer un alignement parfait entre deux éléments différents.
Les axes des deux arbres peuvent être :
confondus \(\Rightarrow\) accouplements rigides
faiblement décalé dans toutes les directions \(\Rightarrow\) accouplements élastiques ou accouplements positifs
décalés angulairement mais concourants au même point \(\Rightarrow\) joint cinétiques
L’objectif de cette activité est d’étudier les caractéristiques de différents joints : défaut tolérés et caractéristiques cinématiques.