Introduction
Il s’agit d’un mécanisme non linéaire avec transformation de mouvement.
Un 3 barres permet de transmettre une puissance mécanique, en transformant un mouvement de translation en mouvement de rotation.
Ce dispositif est constitué de
barre 1 = barre AD fixe ;
barre 2 = barre AC qui s’allonge (constituée de 2 et 2’) ;
barre 3 = barre DO.
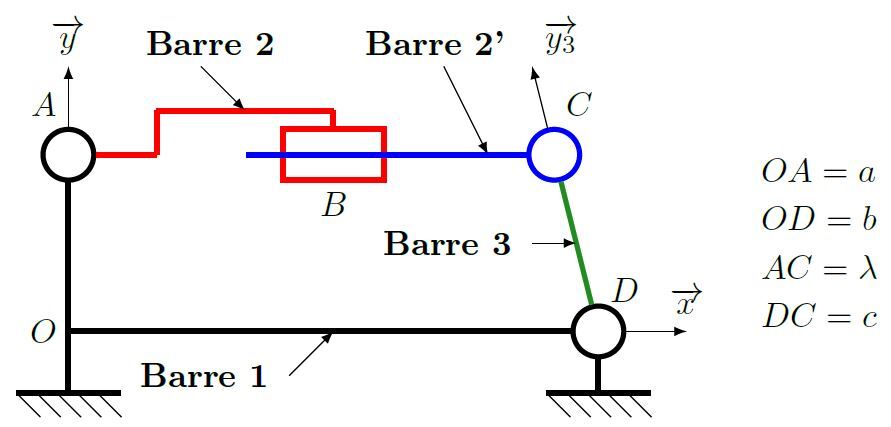
Ce dispositif permet de transformer le mouvement de translation de la barre 2’/barre 2 en mouvement de rotation de la barre 3/barre 1. Le mouvement de translation est obtenu par un actionneur linéaire (vérin pneumatique, hydraulique ou électrique vis-écrou).
Il existe différentes configurations au niveau des liaisons (pivot ou sphérique - pivot glissant ou glissière) cela dépend du degré d’hyperstatisme souhaité dans la modélisation.