Exercice : Challenge
Robot de manutention
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
Adapter la configuration du robot si nécessaire.
Utiliser la ressource Configuration du robot.
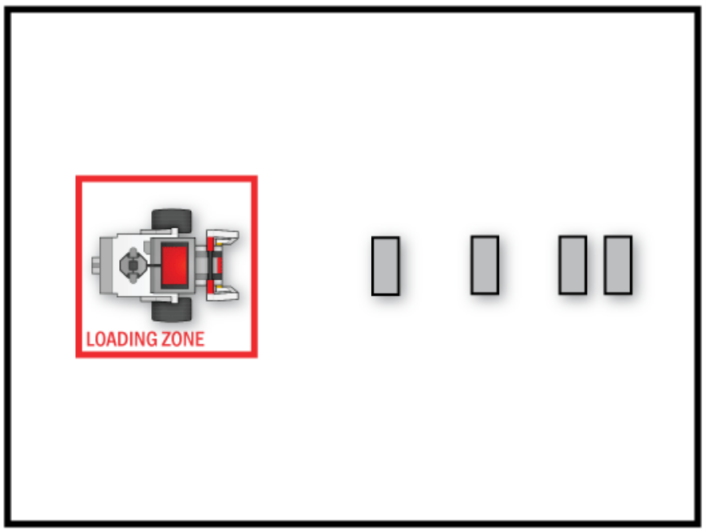
Dans ce défi, vous allez utiliser une boucle afin de programmer votre robot pour déplacer une série de conteneurs dans une zone de chargement. Les conteneurs à déplacés sont placés à intervalles irréguliers, de sorte que vous aurez à utiliser un capteur pour détecter chacun d'eux. Le robot doit alors utiliser son bras pour ramener le conteneur dans la zone de chargement - marqué avec un contour rouge - et le relâcher dans cette zone.
Règles :
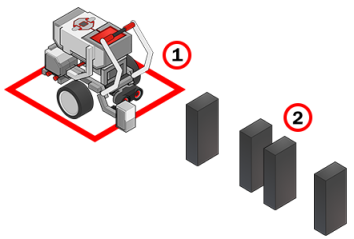
Utilisez quatre objets rectangulaires pour représenter les quatre conteneurs. Ceux-ci peuvent être construits avec des pièces LEGO, découpés dans des boîtes en carton ou toute autre solution donnant satisfaction (vérifier la possibilité de manipuler l'objet avec le bras du robot).
Les quatre objets doivent être placés en ligne droite au début de chaque essai, mais les distances les séparant les uns des autres doivent être modifiées de façon aléatoire.
La zone de déchargement pour les conteneurs doit être marqués par un carré rouge.
Les conteneurs déposés dans la zone de déchargement pourront être retirés à la main pour faire de la place pour le conteneur suivant.
Le robot doit ramener les quatre conteneurs de manière fiable à la zone de chargement, peu importe où ils se trouvaient au départ.
Question
Le robot commence dans la zone de chargement.
Programmez votre robot pour saisir et ramener les boîtes dans la zone de chargement.
Utilisez un capteur à ultrasons pour détecter les boîtes et le capteur de couleur pour détecter la zone de retour.
Indice
Astuce 1: Utilisez une boucle pour répéter des parties similaires du comportement. Vous ne devriez pas avoir à juxtaposer quatre fois le programme pour les quatre conteneurs séparément.
Indice
Astuce 2: Si le robot doit effectuer des actions en priorité avant la boucle, les placer simplement avant la boucle dans le programme.
Indice
Astuce 3: Si le robot doit effectuer des actions après la boucle, les placer simplement après la boucle dans le programme.
Indice
Astuce 4: Utilisez des capteurs pour aider le robot à localiser les conteneurs et la zone de chargement, car les distances exactes requises seront différentes à chaque fois que le robot fonctionne.
FAIRE VALIDER par le professeur avant de passer à la suite.