Nouvel outil : Bloc moteur
Vous pouvez utiliser le "Gros moteur" ou le "Moteur moyen" pour le bras.
Déplacement et direction Vs. Bloc Moteur Déplacer directeur vs bloc moteur
Pour déplacer les roues, vous devez utiliser un bloc "Déplacement et direction" qui synchronise les deux moteurs des roues.
Pour déplacer le bras manipulateur, vous utilisez soit un bloc "Moteur moyen" ou bloc "Gros moteur" parce que vous n'avez pas besoin de synchroniser deux moteurs.
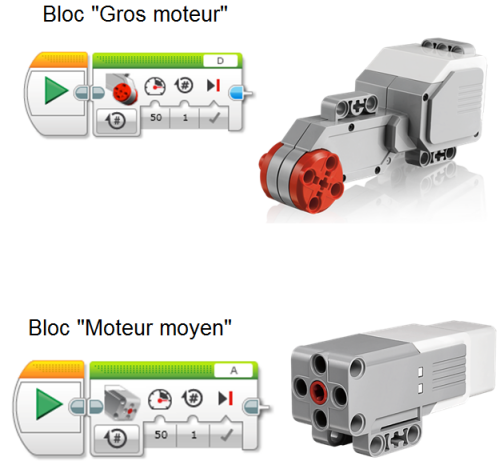
Fixer un moteur moyen sur le Port A ou un gros moteur sur le Port D au besoin.
Ceci est un assemblage générique pour le robot EV3.
Construirele bras manipulateur qui peut ramasser des objets.
Regardez l'exemple sur la droite.
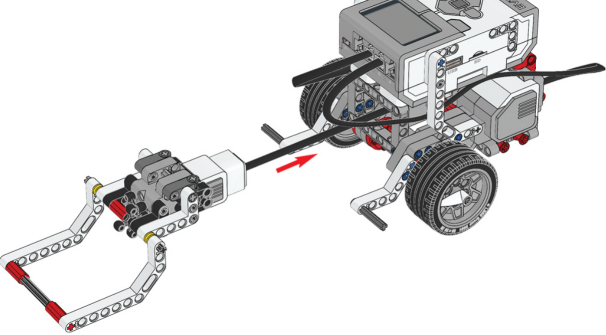
Les instructions de construction du bras manipulateur pour le robot sont disponibles sur le lien ci-dessous. OUVRIR le projet "medium_motor_driving_base" en cliquant sur le lien ci-dessous, en sélectionnant "OUVRIR AVEC" puis en cliquant sur![]() .
.
SUIVRE les instructions à l'aide du logiciel pour construire le bras manipulateur.