Capteur ultrason HC-SR04
Programme de base
Tension: 3.3 - 5V, attention, certains modèles sont en 5V
Fréquence ultrasons : 40 kHz
Étendue mesure : 2-400 cm
Angle de mesure : 15°
Une broche d'entrée : Trig (input)
Une broche de sortie : Echo (output)
Le module ultrason est constitué :
d'un émetteur d'ultrasons qui fonctionne à 40 KHz.
d'un récepteur d'ultrasons
La distance parcourue par les ultrasons est proportionnelle au temps du parcours. La vitesse du son est de 340 m/s.
from microbit import *
from time import sleep_us, sleep_ms
from machine import time_pulse_us
#brancher le capteur sur P2/P16def distance(sig):
sig.write_digital(1)
sleep_us(10)
sig.write_digital(0)
sig.read_digital()
t = time_pulse_us(sig, 1)
d = 340 * t // 20000
return d
while True:
mesure=distance(pin2)
print("distance = ",mesure,"cm")
sleep(2000)
Distance = temps d'écho du signal * Vitesse du son / 2
Si la mesure du temps est en uS et la distance en cm, on peut utiliser la formule suivante
Distance = temps x 0, 0345/2
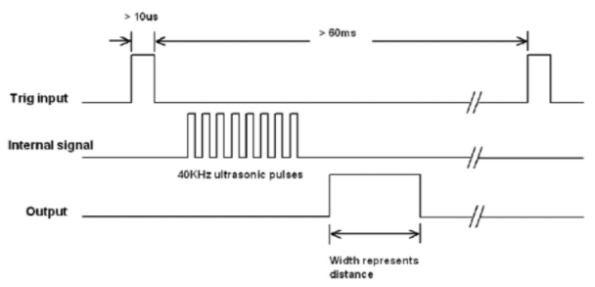
Pour déclencher une mesure, il faut générer une impulsion "high" (3,3 V) d'au moins 10 μs sur l'entrée "Trig input" avec la carte microbit.
Le module HC04SR émet alors une série de 8 impulsions ultra-soniques à 40 kHz, puis il attend le signal réfléchi.
Lorsque celui-ci est détecté, il envoie un signal "high" sur la sortie "Output" (ou Echo), dont la durée est proportionnelle à la distance mesurée. on utilisera la fonction time_pulse_us de la carte microbit pour connaitre la durée de la réponse.