Prise en main de l'application Teaching & Playback
1 - Sélection de l'outil
Avant toute chose il est important de sélectionner le bon outil, dans notre démonstration nous utilisons la ventouse "SuctionCup"

2 - Sélection de l'application
Sur l'écran principal du logiciel Dobot Studio, appuyer sur l'application Teaching & Playback 

3 - Enregistrement d'une série de mouvement
En mode apprentissage, c'est l'utilisateur qui indique au bras robotisé les mouvements à effectuer :
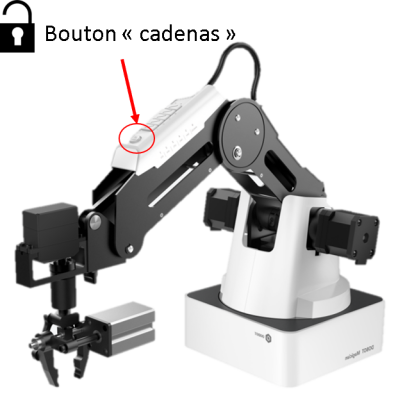
D'une main prendre le bras robotisé et de l'autre appuyer délicatement sur le bouton "cadenas ".
Déplacer le bras sur une nouvelle position puis relâcher le bouton pour enregistrer cette nouvelle position.
Recommencer la procédure pour enregistrer deux autres points.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
Sur la fenêtre de l'application Teaching & Playback vient d'apparaitre :
Trois lignes notées de 1 à 3 correspondant aux trois positions enregistrées.
Un bandeau qui permet de créer un nouveau jeu de position, d'ouvrir un jeu enregistré précédemment, de sauver le jeu actuel et enfin le bouton start qui permet de jouer les positions enregistrées.

4 - Lecture et modification des mouvements
Appuyer sur le bouton START et observer le mouvement du robot, celui-ci repasse par les positions précédemment enregistrées
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
Il est possible maintenant de modifier le comportement du bras robotisé :
En plaçant le curseur de la souris sur une ligne et en appuyant sur le clic droit un onglet apparaît.
Il est alors possible de copier-couper / coller ou supprimer une ligne (Copy Cut Paste Delete).
MoveUp et MoveDown permet de faire remonter ou descendre la position enregistrée et donc de modifier le mouvement du bras.
Delete All permet de supprimer toutes les positions enregistrées.
Run Seleted permet de jouer seulement la position sélectionnée.
OverWrite permet de copier sur la ligne sélectionnée la position actuelle du bras motorisé.
