Moteur 25D à engrenage métallique Pololu

Gamme de moteurs CC cylindriques de 25 mm de diamètre pourvus d'un axe en D de 4 mm de diamètre. Vous pouvez choisir votre modèle en fonction de critères tels que la puissance, le rapport de réduction et la présence ou non d'un encodeur.
Les motoréducteurs 25D mm sont déclinés suivant ces critères :
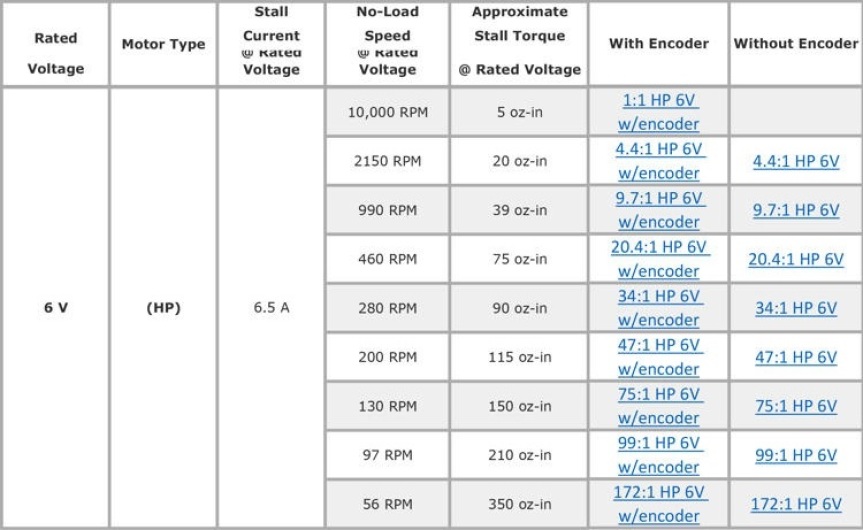
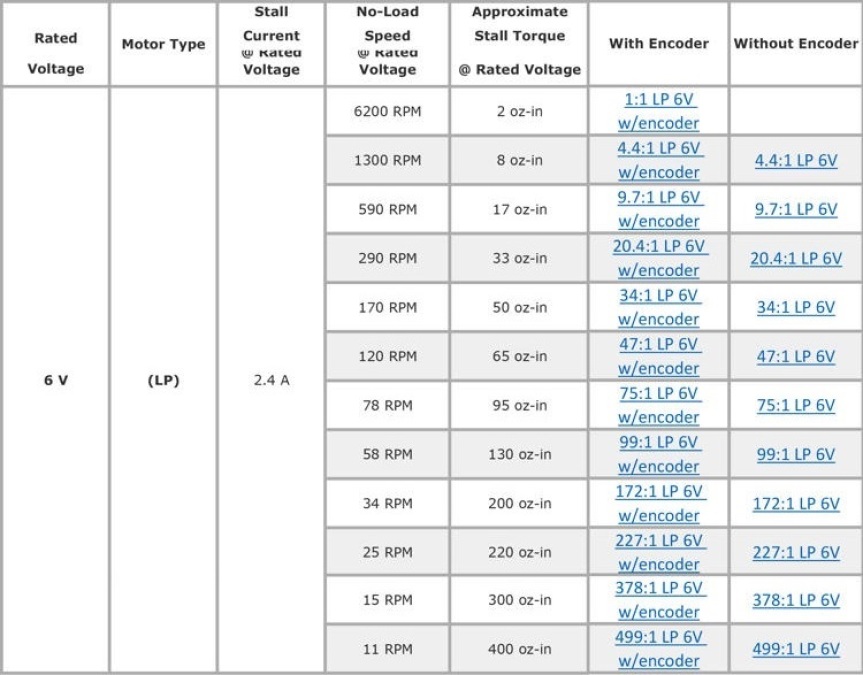
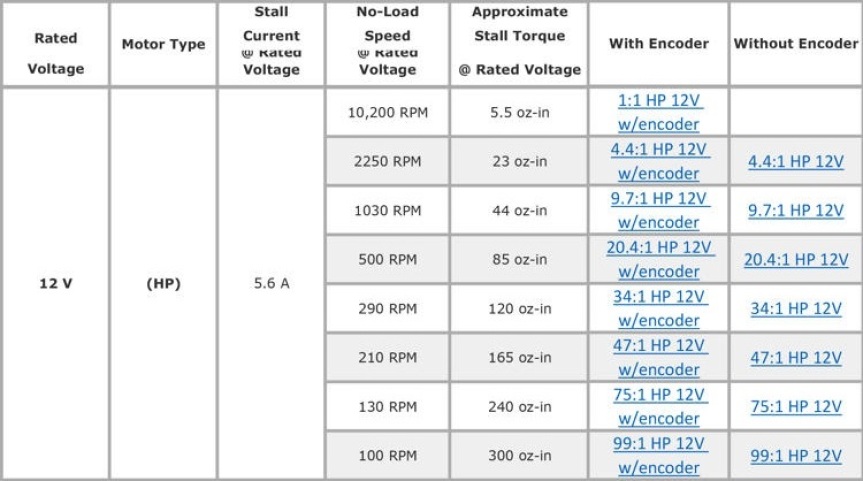
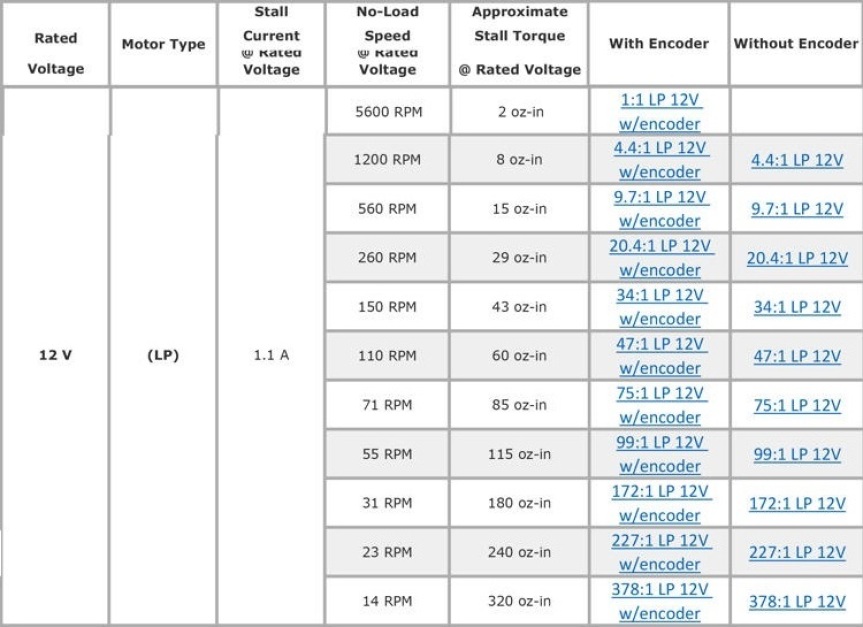
5 types de moteurs : 6V en puissance élevée (HP) ou basse (LP), et 12V en puissance élevée (HP), moyenne (MP) ou basse (LP)
le rapport de réduction (notez que tous les ratios ne sont pas disponibles pour tous les types de moteurs)
la présence ou non d'un encodeur de moteur
Les dimensions, hormis la longueur totale, sont identiques, ce qui vous permet d'échanger facilement une référence avec une autre dans votre montage. Si vous n'avez pas encore déterminé la forme de votre futur robot, n'hésitez pas à consulter notre sélection de châssis robotiques.
Vous trouverez ci-après un tableau vous permettant d'identifier plus facilement le moteur le plus adapté à votre projet, en fonction de vos contraintes en matière de couple, vitesse de rotation ou consommation électrique.

Fonctionnement de l'encodeur (optionnel) :
L'encodeur du Moteur CC Pololu mesure la rotation d'un disque magnétique situé à l'arrière de l'axe moteur. Cet encodeur à effet Hall offre une résolution de 48 pas par tour de l'axe moteur. Pour connaître la résolution par tour de l'axe de sortie, il suffit de multiplier le rapport de réduction par 48. Par exemple pour un ratio 34:1, la résolution est de 48 x 34 = 1632 pas par tour de l'axe de sortie.
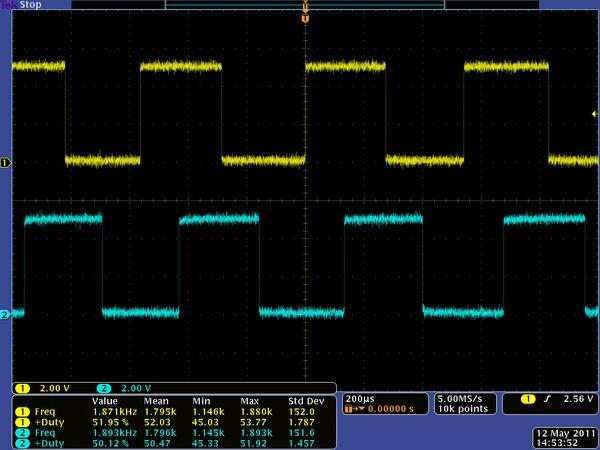
L'encodeur requiert une tension d'entrée comprise entre 3.5-20 V et consomme au maximum 10 mA. Les deux sorties A et B renvoient un signal carré entre 0 et la tension d'entrée avec un décalage de phase d'environ 90° (voir image d'oscilloscope ci-dessous). Chaque front montant et descendant des deux encodeurs indique un pas de révolution. La fréquence des fronts indique donc la vitesse de rotation (1633 pas par tour de l'axe de sortie, avec un ratio 34:1) et l'ordre des transitions permet de connaître la direction.
Le tableau ci-dessous décrit le rôle des différents fils permettant de contrôler le moteur et de récupérer les sorties de l'encodeur.
Couleur | Fonction |
|---|---|
Rouge | Alimentation moteur (3-9 V) |
Noir | Masse moteur |
Vert | Masse encodeur |
Bleu | Alimentation encodeur (3,5-20 V) |
Jaune | Sortie encodeur A |
Blanc | Sortie encodeur B |

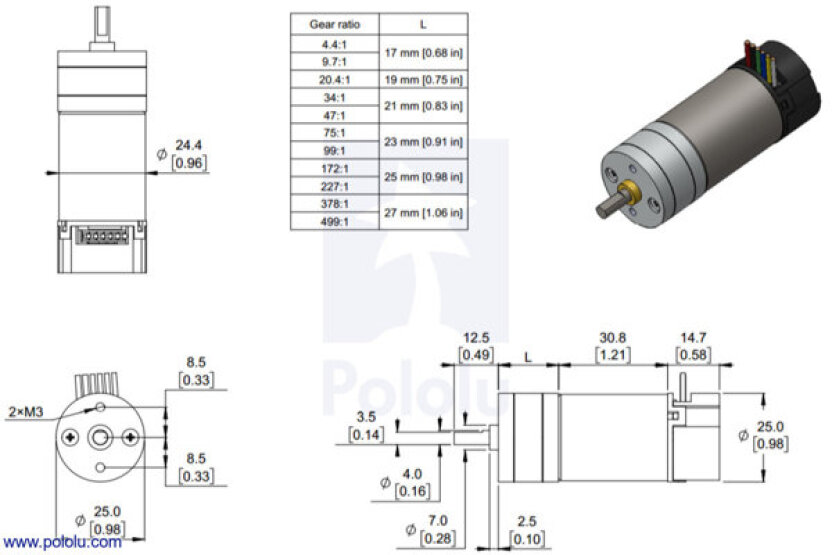
Dimensions :
diamètre du moteur : 25 mm
longueur du moteur sans encodeur : de 48 à 58 mm selon le ratio (voir diagramme ci-après) - 31 mm pour le ratio 1:1
longueur de l'encodeur (si inclus) : 12 mm
diamètre de l'axe : 4 mm (forme en D)
longueur de l'axe : 12.5 mm (dont une bague métallique de 2.5 mm)
poids : 95 g (60 g pour les ratio 1:1)
Le moteur inclus un capuchon de protection noir (qu'il est possible d'enlever).
Spécificité de la version 1:1 :
Le moteur de ratio 1:1 dispose toujours d'un encodeur, mais est fourni sans boîtier de réduction. Il n'a pas d'axe de sortie, mais d'un engrenage à 12 dents, compatible avec les blocs réducteurs de toutes les autres versions. A ce titre, ce moteur est davantage conçu pour servir de remplacement que pour être utilisé directement.
Note : Afin de préserver le moteur et lui assurer une longévité optimale, il est recommandé de ne pas le soumettre à une tension ou une charge excédant ses caractéristiques nominales.