4. Quatrième partie : Validation par modélisation comportementale
On se propose de vérifier qu'un modèle de comportement donne des résultats conformes aux observations.
On a modélisé le mécanisme observé, Moteur + Chaîne cinématique, avec le logiciel MATLAB-Simulink.
TÉLÉCHARGER puis DÉCOMPRESSER le fichier suivant :
LANCER le logiciel MATLAB R2018b puis OUVRIR le fichier de modèle BioAccess_modele_comportement.slx .
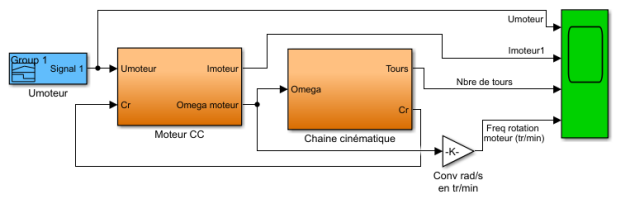
Q4.1. IDENTIFIER et CARACTÉRISER les variables externes d'entrée et de sortie du système modélisé
Variable(s) d'entrée :
Variable(s) de sortie :
Q4.2. LANCER la simulation et déterminer le temps mis pour effectuer le nombre de tours nécessaires au déverrouillage (déterminé dans la partie 2). Comparer à la valeur trouvée à partir de la vidéo (partie 2).
Nota : il sera sans doute nécessaire d'utiliser les fonctions zoom (onglets présent au- dessus des graphes)
tdéverrouillage vidéo =
tdéverrouillage matlab =
Conclusion :
Q4.3. A partir des courbes obtenues, DÉTERMINER le temps total de rotation du moteur, puis COMPARER à la valeur trouvée à partir de la vidéo (partie 2). CONCLURE sur la conformité de cette valeur.
ttotal de rotation vidéo =
ttotal de rotation matlab =
Conclusion :
Q4.4. COMPARER les valeurs des pointes d'intensité au démarrage du moteur entre les relevés de la questions 1 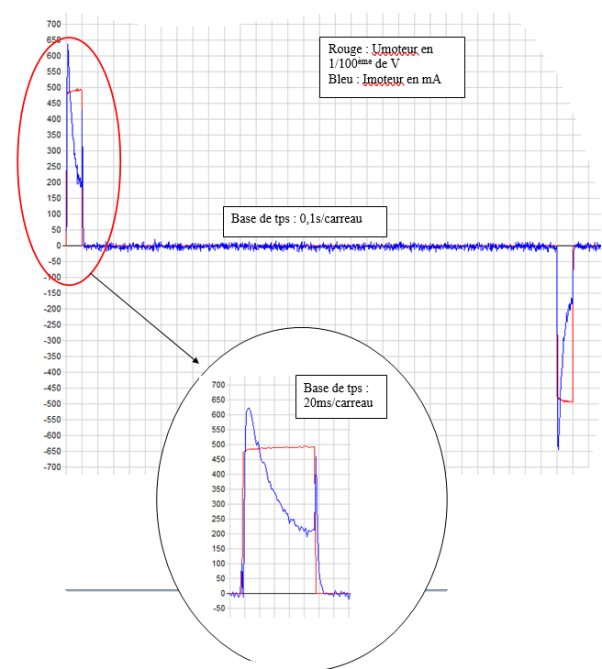 et la simulation
et la simulation
Ipointe démarrage relevés =
Ipointe démarrage matlab =
Conclusion :
Q4.5. En comparant les résultats de la simulation avec les essais, pensez-vous que le modèle numérique puisse-t-être validé ? JUSTIFIER votre réponse.