Influence du paramètre proportionnel
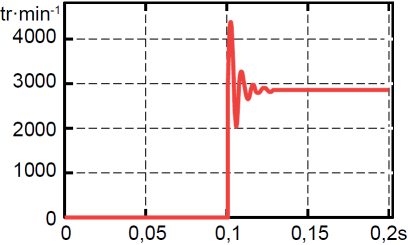
Le paramètre proportionnel correspond à un gain « K » (coefficient). Ce dernier permet d’amplifier l’écart entre la consigne et la mesure de la réponse du système :
\(\mathbf { \large {U= K\times Ecart}}\)
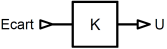
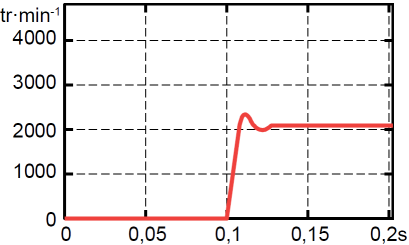
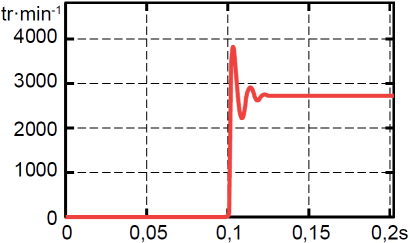
Exemple : Courbes de la vitesse de rotation du moteur à courant continu pour une vitesse de consigne de 3000 tr·min-1.
K = 2 | K = 10 | K = 20 |
|---|---|---|
|
|
|
Avantages
La régulation au travers du correcteur proportionnel permet:
de réduire le temps pour atteindre le régime permanent
de diminuer l’erreur statique en régime permanent donc amélioration de la précision
Inconvénient
le premier dépassement est plus important d’où une dégradation de la stabilité.