Introduction
Objectifs pour les semaines 3 et 4 :
Intégration des différentes fonctions (capt_distance, cmd_motors et afficheur_rgb) de la semaine 1 dans un même fichier mode_auto.
Étude du déplacement du robot dans une pièce avec des obstacles.
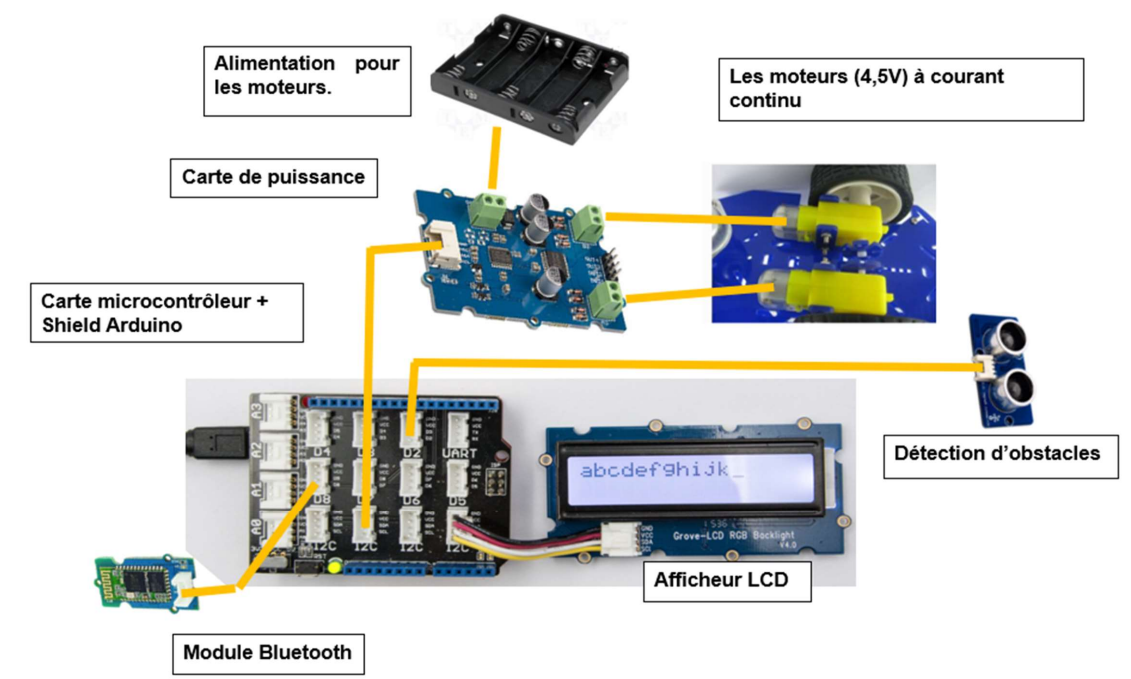
Rappels : implantation des différents éléments : capteur de distance, carte moteur, carte microcontrôleur etc--