Comment contrôler l'interface de puissance ? - Le Pont en H
Un moteur DC ne peut être directement commandé par une carte Arduino. Même si le niveau de tension pourrait être suffisant pour certains moteurs, le niveau de courant trop faible empêcherait celui-ci de fonctionner correctement (Couple trop faible…). Il est donc nécessaire de passer par une interface de puissance, fournissant l'énergie nécessaire au bon fonctionnement du moteur.
Le déplacement du robot doit être assuré par deux moteurs à courant continu. Chacun de ces moteurs est commandé séparément grâce à une interface de puissance "Pont en H"
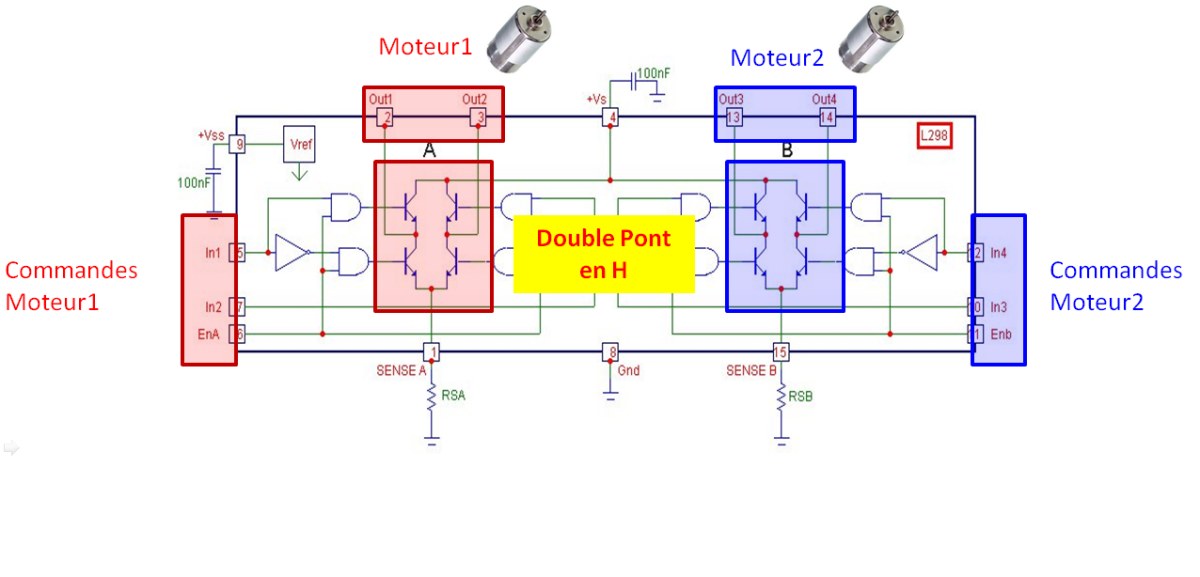
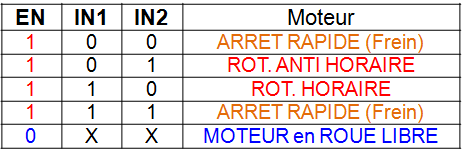
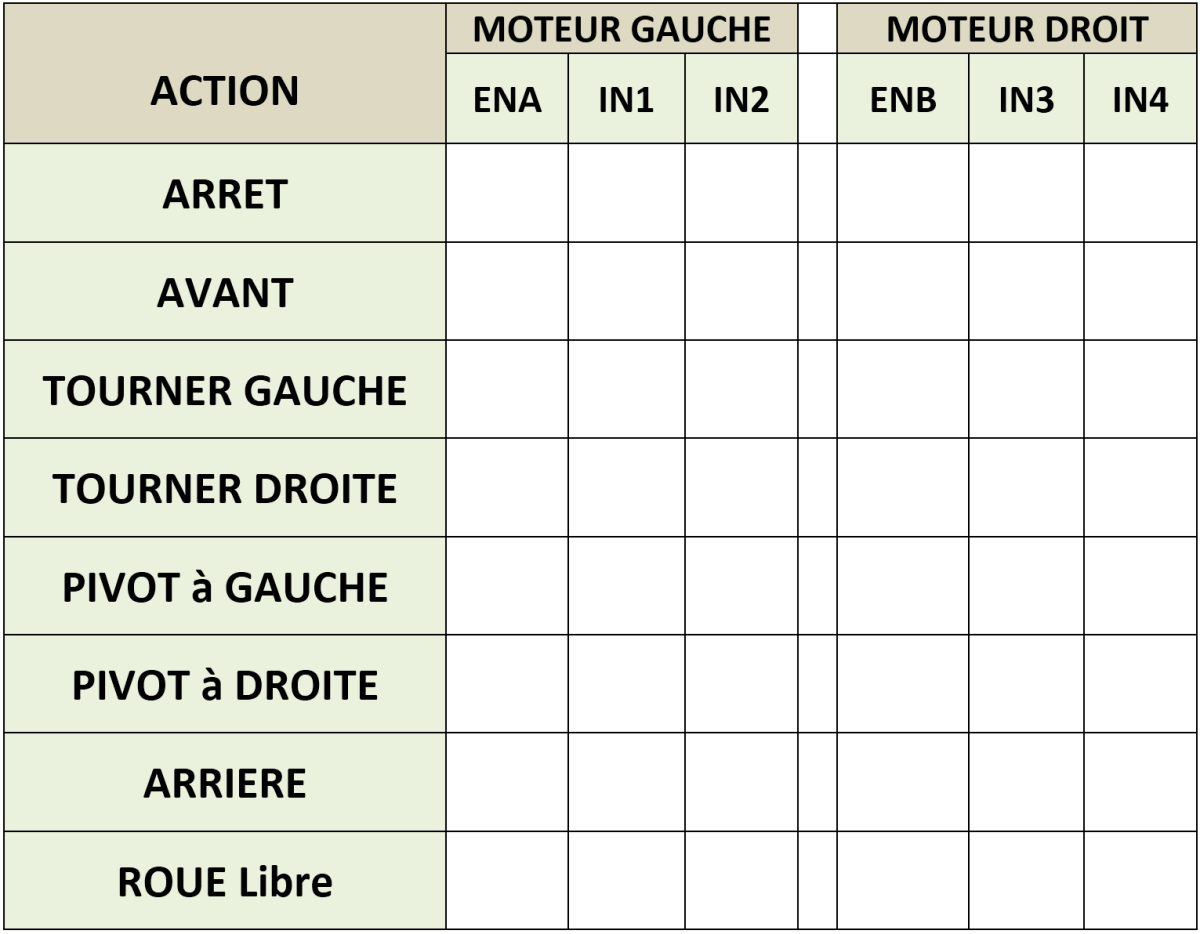
Les commandes des moteurs sont assurées par trois signaux logiques : ENA, IN1 et IN2 pour le MOTEUR1 (Gauche) et ENB, IN3, IN4 pour le MOTEUR2 (Droite) :
Pour répondre aux questions suivantes vous pouvez vous aidez du diaporama suivant Capsule L298 Pont en H.ppsx [ppt]
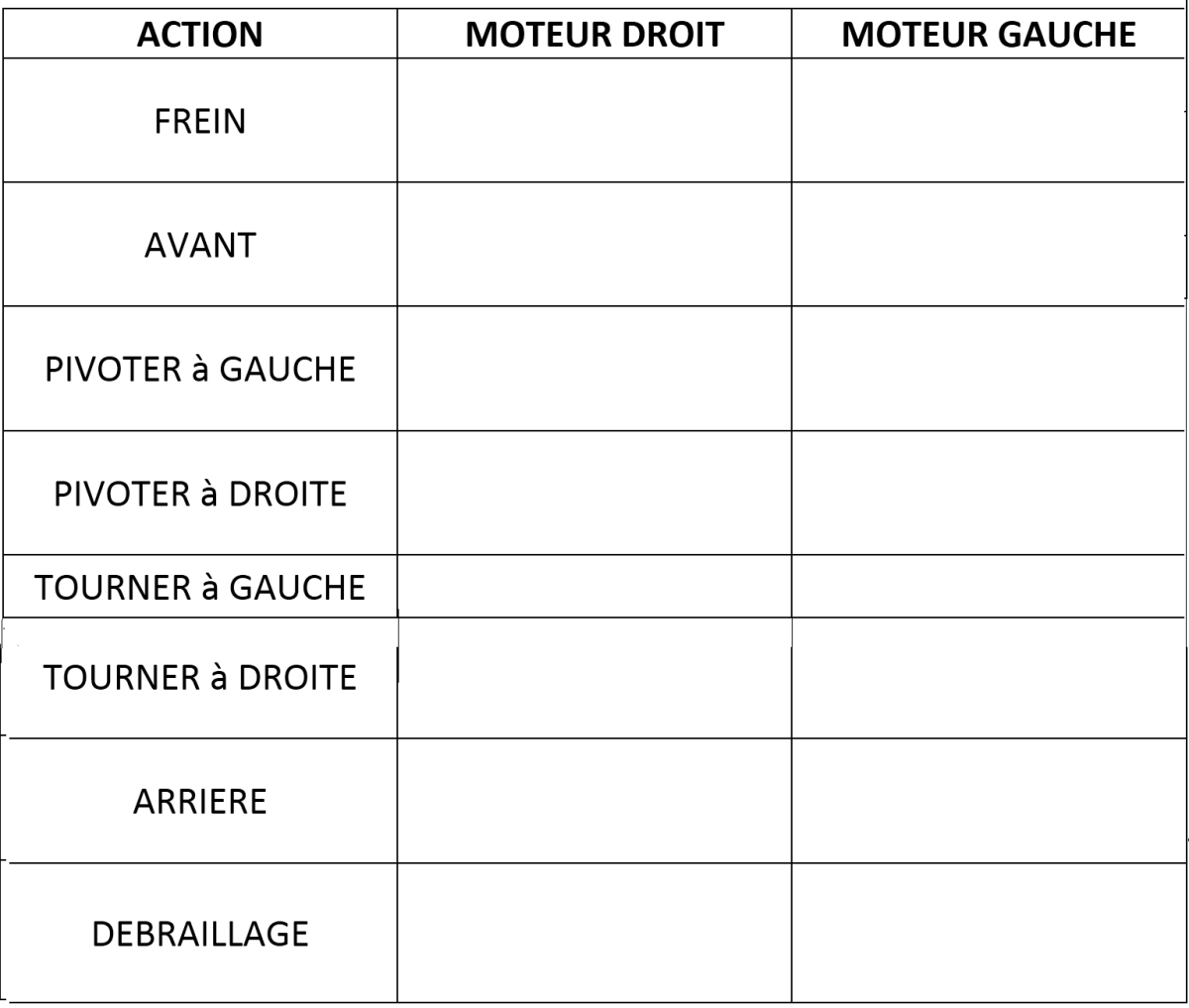
Q5. Si l'on considère 4 commandes possibles (AVANT , ARRIERE, ROUE LIBRE et ARRET ) pour chaque moteur, indiquez l'état de chacun d'entre eux pour réaliser les actions suivantes de déplacement :
Q6. Si l'on considère le sens de rotation horaire comme la commande permettant de faire avancer le Robot, indiquez l'état des signaux logiques (0 ou 1 ) pour réaliser les actions suivantes :
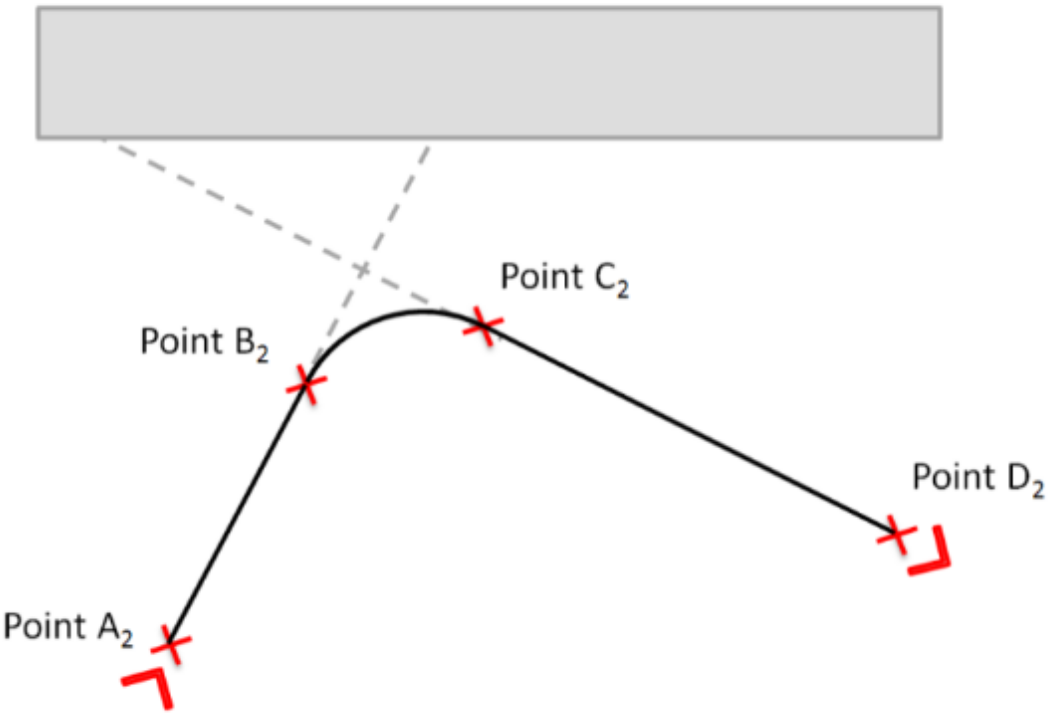
Q7. En prenant exemple du parcours ci-dessous, indiquez les différentes commandes à envoyer au moteurs du Robot pour lui permettre de réaliser le circuit en boucle ci-contre :