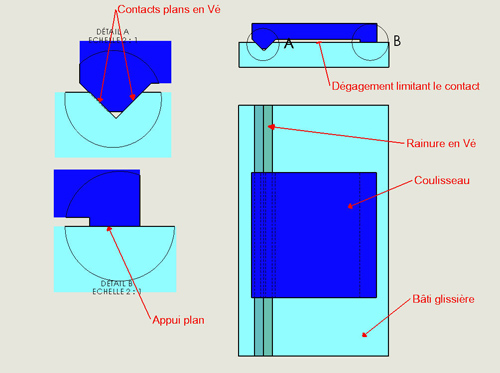
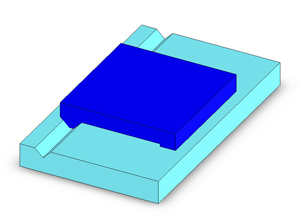
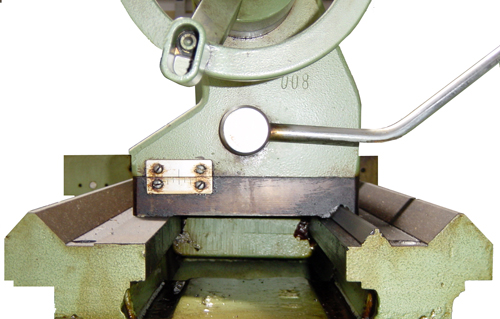
Dans ce cas, on associe un appui plan classique et deux appuis plan formant un Vé et garantissant un contact surfacique bilatéral assurant la trajectoire rectilgne. Cette solution a été longtemps retenu dans les guidages en translation des chariots mobiles de machines outils, car il allie précision et résistance aux efforts (dans une direction, car la liaison reste unilatérale). Mais sa réalisation doit ętre trčs précise et reste coűteuse.
|