Couple électromagnétique - Couple moteur Couple électromagnétique - Couple moteur
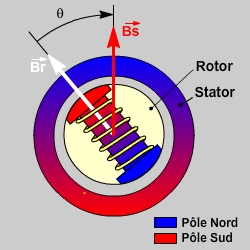
q est l'angle électrique du moteur synchrone (angle entre les vecteurs représentatifs des champs rotorique et statorique). Dans le cas d'un moteur bipolaire il est égal ŕ l'angle mécanique. Soit Bs le champ magnétique statorique et Br le champ magnétique rotorique. A vide q = 0° . Mais en charge l'angle q augmente avec le couple résistant. Le couple transmissible vaut : C = K x Br x Bs x sin(q) oů K est une constante fonction des caractéristiques du moteur et du courant utilisé.
|