Les moteurs synchrones sont des moteurs ŕ champ magnétique rotatif dans lesquels le champ statorique tourne de maničre synchrone au champ rotorique. La disposition spécifique des enroulements statoriques et la suite chronologique des phases du courant d’entrée créent un champ magnétique. La vitesse du champ Ns se calcule ŕ l’aide de la formule suivante :  | f : fréquence" de la tension appliquée p : nombre de paires de pôles du stator |
Comme un moteur asynchrone, le stator est composé du carter, du paquet de tôles et du bobinage statorique. Le rotor est composé d’un arbre, de tôles rotoriques et d’aimants permanents collés. Pour assurer une meilleurs dynamique au moteur, les tôles du rotor ne sont pas pleines, mais usinées avec des évidements. Ceci permet de diminuer le moment d’ inertie de masse du rotor et donc de raccourcir la phase d’accélération du moteur. Si le moteur synchrone fonctionne avec une fréquence constante de la tension d’alimentation, la vitesse du rotor est identique ŕ la vitesse du champ tournant. Si le moteur est soumis ŕ une charge on observe un décalage du champ tournant du rotor par rapport au champ tournant du stator. Les pôles de la roue polaire (rotor) sont ainsi déphasés par rapport ŕ ceux du champ statorique, ce déphasage ayant une valeur précise symbolisé par α. Le couple augmente tout d’abord proportionnellement ŕ l’augmentation de l’angle de déphasage. | 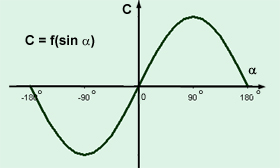 | | Lorsque ce déphasage est exactement ŕ 90°, et que les pôles du rotor sont positionnés exactement au milieu de 2 pôles du stator, la force agissant sur le rotor est maximale. Au-delŕ de cette valeur, c'est-ŕ-dire lorsque le moteur est surchargé, le couple diminue ŕ nouveau ; le moteur se trouve alors dans une position instable et s’arręte. |
|