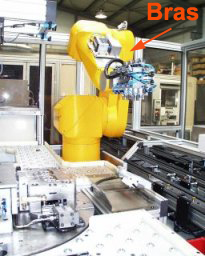
La figure ci-contre reprťsente un robot de transfert de piŤces. Le bras doit pivoter dans les deux sens : on aura donc pour son moteur N<0 et N>0 dans le repŤre des quatre quadrants.
Dans un souci de productivitť, sa motorisation permet de grandes accťlťrations malgrť une inertie J ramenťe sur son arbre moteur importante.
Les graphes ci dessous mettent en ťvidence les phases de fonctionnement et les diffťrentes situations dans le repŤre des quatre quadrants
On observe dans cet exemple que le moteur du bras devra pouvoir fonctionner dans les 4 quadrants, c'est ŗ dire soit en moteur soit en frein et ce pour les 2 sens de rotation.
|