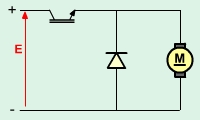
Avec un hacheur, l'allure de la tension de sortie du pont est en créneaux (chapitre hacheur). La tension d'induit n'est pas continue, mais ce n'est pas gęnant car le moteur ayant une inertie importante met donc du temps ŕ "réagir" ŕ la tension qui lui est appliquée. Globalement, il ne "voit" que la valeur moyenne du signal haché. La fréquence de hachage est toujours élevée : plusieurs kHz afin de diminuer l'ondulation de courant et donc l'ondulation de couple. Le hacheur utilise des transistors MOSFET ou IGBT. Les performances dynamiques sont bonnes et on utilise les hacheurs sur des applications de positionnement (par exemple avec des MCC ŕ rotor discoďde).
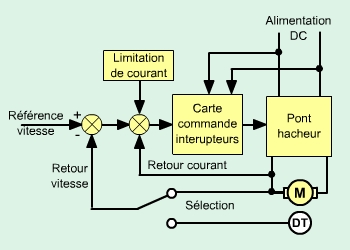
Le schéma général de la commande est décrit ci-dessous :
|