Le principe de fonctionnement est de rendre les contrŰles de flux et de couple indťpendants, ce qui n'est habituellement pas le cas ( la tension V ťtant ŗ l'origine de ces deux grandeurs ). La carte ťlectronique dťcompose le courant statorique en : Les performances optimales du moteur sont obtenues si le flux, donc le courant magnťtisant Id, est maintenu constant sur toute la plage de vitesse. Ceci permettra d'avoir le couple souhaitť sur l'ensemble de la gamme de vitesse. Pour commander vectoriellement, le calculateur doit avoir une information sur les courants statoriques et une information de position du rotor : soit la position du rotor est estimťe par calcul , on est alors en boucle ouverte soit la position exacte du rotor est connue ŗ l'aide d'un capteur ( resolverÖ ) , on est en boucle fermťe.
Schťma gťnťral de rťgulation de vitesse : 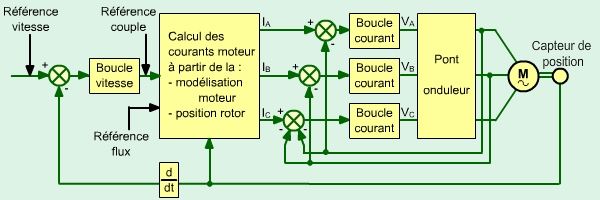
ContrŰle vectoriel en boucle ouverte : | ContrŰle vectoriel en boucle fermťe : | 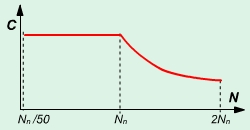
| 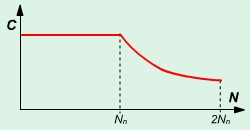
| La position du rotor est estimťe, on ne maitrise pas le couple ŗ vitesse nulle. Utilisable de Nn/50 ŗ Nn | La position du rotor est rťelle, et on dispose du couple nominal, mÍme ŗ vitesse nulle. Utilisable sur toute la plage de vitesse. |
Remarque : ces courbes reprťsentent les limites du point de fonctionnement du moteur quand la frťquence varie. Ce ne sont en aucun cas la courbe C= f(N) de la machine asynchrone !
|
