Dossier technique du Robot Youpi
Présentation
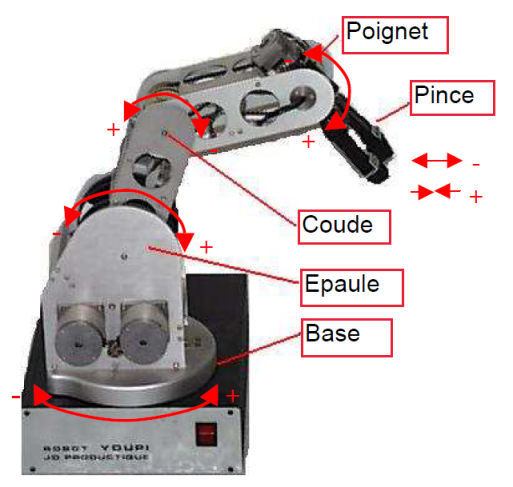
Le bras motorisé permet de saisir un objet de taille réduite et de le déplacer suivants plusieurs directions.
Les mouvements possibles sont les suivants :
Commandes du système
Les divers capteurs et actionneurs qui commandent les mouvements du bras sont :
M1 : moteur base | C1 : capteur base |
M2 : moteur épaule | C2 : capteur épaule |
M3 : moteur coude | C3 : capteur coude |
M4 : moteur poignet | C4 : capteur poignet |
M5 : moteur rotation pince | C5 : capteur rotation pince |
M6 : moteur fermeture pince | C6 : capteur fermeture pince |
Pour piloter les moteurs, il est nécessaire de procéder en deux étapes :
Envoi du sens de rotation
Pour cela, il faut envoyer d'abord un octet de mémorisation avec D7 à 1, D6 à 0 et les autres bits dépendant du sens désiré. Un second octet de validation doit être envoyé avec D7 et D6 à 0 et les autres inchangés.
Validation du signe | Sens M6 | Sens M5 | Sens M4 | Sens M3 | Sens M2 | Sens M1 | |
|---|---|---|---|---|---|---|---|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
1 | 0 | 0\(-\) / 1+ | 0\(-\) / 1+ | 0\(-\) / 1+ | 0\(-\) / 1+ | 0\(-\) / 1+ | 0\(-\) / 1+ |
Impulsion de pas
Pour faire tourner un moteur d'un pas ou d'un demi pas, il faut envoyer d'abord un octet de mémorisation avec D7 à 0, D6 à 1 et les autres (D3 à D4) dépendant du moteur à piloter. Un second octet de validation du pas doit être envoyé avec D7 et D6 à 0 et les autres inchangés.
Validation du signe | Sens M6 | Sens M5 | Sens M4 | Sens M3 | Sens M2 | Sens M1 | |
|---|---|---|---|---|---|---|---|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
0 | 1 | M1 (000) → M2 (000) → M3 (000) → M4 (000) → M5 (000) → M6 (000) → | 0 0 0 0 1 1 | 0 0 1 1 0 0 | 0 1 0 1 0 1 | ||
Pour commander la rotation d'un moteur sur un pas et dans un sens donné, il faudra donc envoyer quatre octets successifs, séparés chacun par une temporisation.
Les capteurs photosensibles permettent de placer le bras dans une position dite « initiale ». Ils sont de type tout ou rien dépendant de la couleur, blanche ou noire, détectée.
Module d'interface pour PC
Le bras peut être commandé via le port parallèle du PC. Le schéma structurel de l'interface est le suivant :
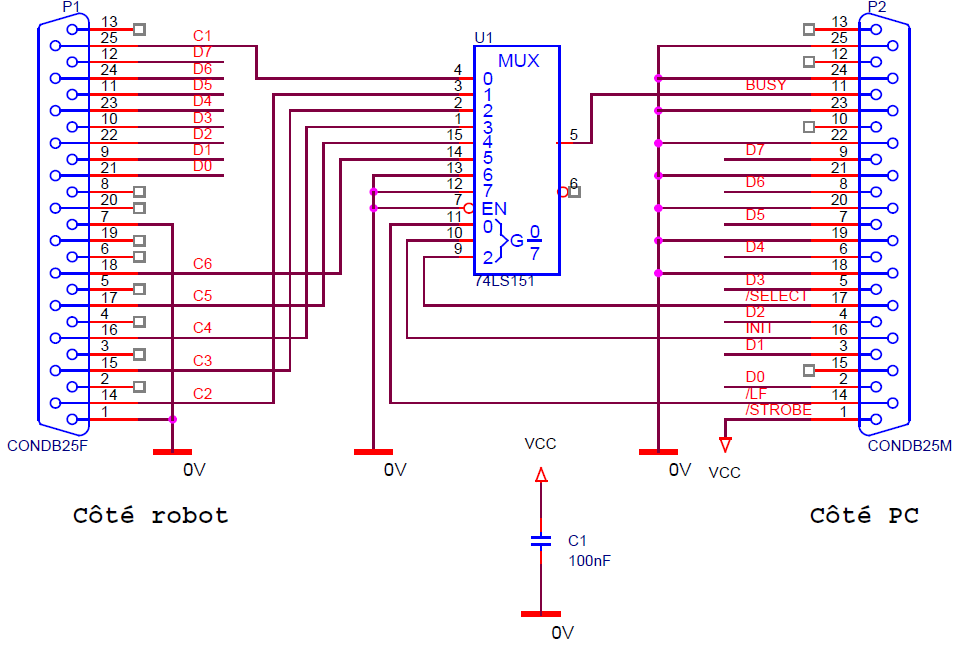
Le bus de donnés D0 à D7 pilote les moteurs tandis que le signal BUSY scrute l'état des capteurs en fonction des signaux /SELECT, INIT et /LF.
Description de la pince
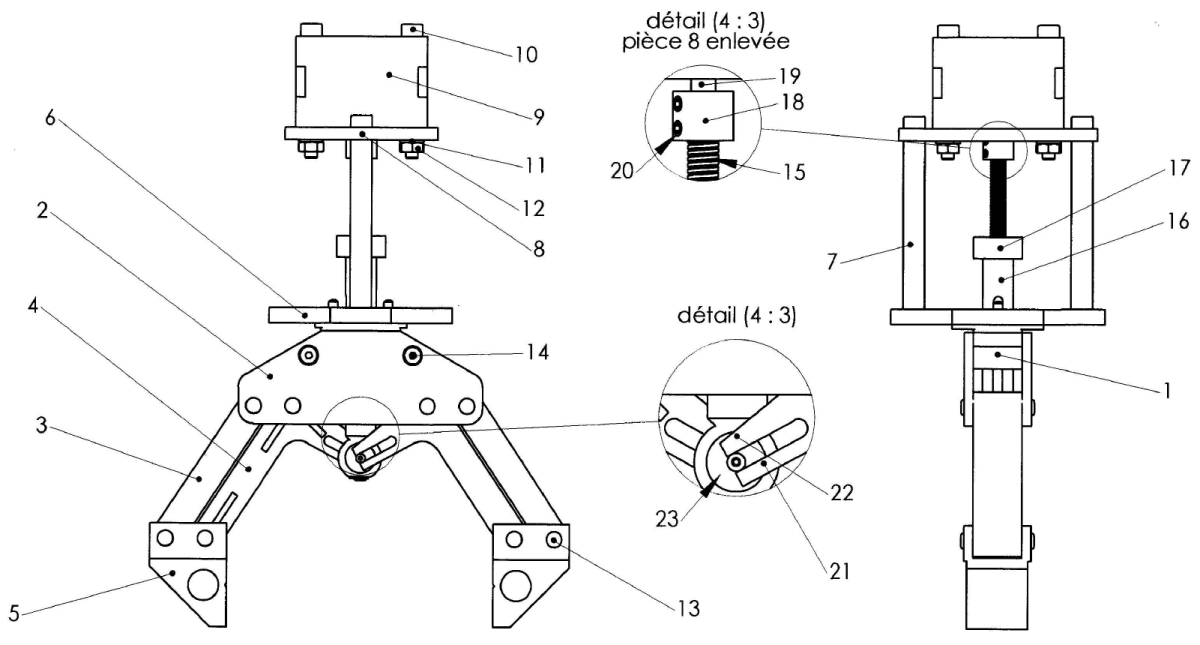
Nomenclature
23 | 1 | Anneau élastique | C 60 | |
22 | 1 | Axe | C 40 | |
21 | 1 | Sphère | ||
20 | 2 | Vis sans tête HC M3 | ||
19 | 1 | Axe moteur | C 40 | |
18 | 1 | Accouplement | ||
17 | 1 | Butée | ||
16 | 1 | Axe de poussée | ||
15 | 1 | Vis de manœuvre M5 | Pas : p = 0,75mm/tr | |
14 | 4 | Vis FHC | ||
13 | 8 | Axe de pivot | ||
12 | 4 | Ecrou H | ||
11 | 4 | Rondelle plate | ||
10 | 4 | Vis CHC | ||
9 | 1 | Moteur | Réf. : 440-436 | |
8 | 1 | Plaque fixation moteur | ||
7 | 2 | Tige | ||
6 | 1 | Plaque support | ||
5 | 2 | Mors | Polyamide | PA - 6,6 |
4 | 2 | Levier | ||
3 | 2 | Biellette | ||
2 | 2 | Plaque coté | ||
1 | 1 | Socle | ||
Rep | Nb | Désignation | Matière | Observation |
|---|