Modes de pilotages
il existe plusieurs modes de pilotages
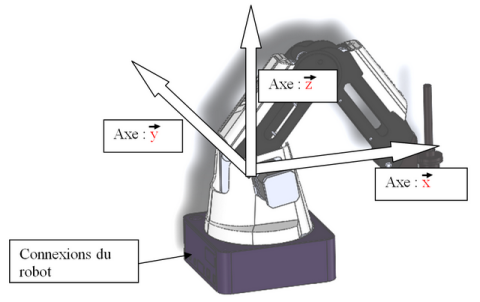
Méthode : Par pilotage manuel cartésien
La mise en mouvement du bras se fait en cliquant sur X+/-, Y+/-, Z+/- (X, Y, Z représentant les
axes du repère de base du robot)
Méthode : Par pilotage manuel des articulations
La mise en mouvement du bras se fait en cliquant sur J1+/-, J2+/-, J3+/-, J4+/-, voir la figure
qui suit

Méthode : Par « Teaching&Playback »
Ce mode permet de faire un apprentissage de mouvement en déplaçant manuellement le robot. Pour cela, il faut suivre cet procédure :
Procédure « Teaching&Playback »
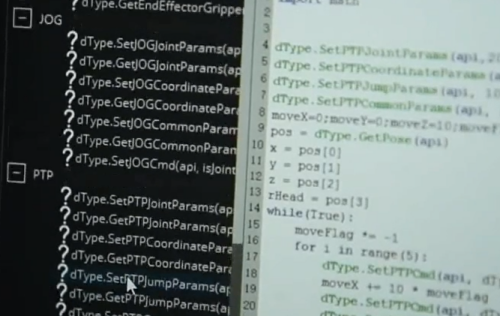
Méthode : Par programmation
Ce mode permet de piloter précisément le robot à partir de méthode préconstruite