Prise en compte de la présence d'un véhicule
On souhaite maintenant prendre en compte la présence d'un véhicule.
La variable correspondante est «VEHICULE ».
Question
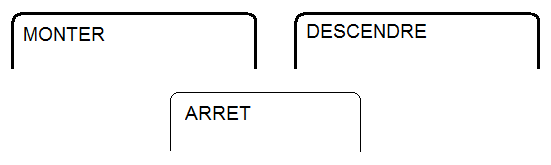
Q10/ EXPLIQUER quel est le mouvement à interdire lorsque cette variable est au NL « 1 ».
MODIFIER en conséquence une transition dans le diagramme états-transitions.
TESTER le fonctionnement, FAIRE VALIDER.
Validation par le professeur : ![]()
Stateflow | Ouvrir un chart | Représenter un état | Représenter une transition | Apporter des commentaires | Utiliser des opérateurs logiques | Effectuer des comparaisons | Établir une temporisation |
REPRODUIRE la transition sur le diagramme de la question 9, FAIRE APPARAÎTRE les modifications en VERT.
On dispose de trois variables de sorties (Haut, Bas, Move) encore inutilisées, permettant d'émettre des comptes-rendus sur l'état de l'arceau.
Remarque : on suivra l'évolution de ces variables sur les displays correspondants du modèle Matlab.
Exigences n° :
Haut et Bas sont au NL « 1 » respectivement quand l'arceau est en fin de course haute / basse.
Move est au NL « 1 » quand l'arceau est en mouvement.
Question
Q11 / PROPOSER puis METTRE EN ŒUVRE une solution permettant de satisfaire les exigences énoncées ci-dessus.
TESTER le fonctionnement, FAIRE VALIDER.
Stateflow | Ouvrir un chart | Représenter un état | Représenter une transition | Apporter des commentaires | Utiliser des opérateurs logiques | Effectuer des comparaisons | Établir une temporisation |
Validation par le professeur : ![]()
FAIRE APPARAÎTRE les modifications ci-dessous, en BLEU.
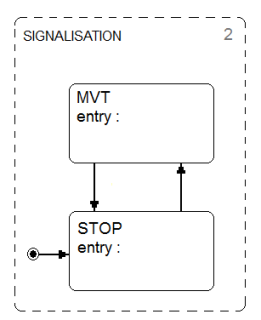
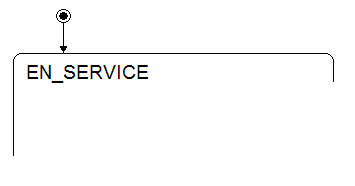
On opte pour une autre solution pour satisfaire l'exigence relative à la variable MOVE : RAJOUTER l'état SIGNALISATION, conformément à la figure ci-dessous. Après sélection de l'état EN_SERVICE, CLIQUER DROIT et OPTER pour la commande « Decomposition/Parallel (AND) ».
Les états COMMANDE et SIGNALISATION apparaissent alors avec un trait en pointillés et sont affectés des numéros 1, 2 : ils sont simultanément actifs.

Question
Q12 / RENSEIGNER le rectangle état SIGNALISATION.
TESTER le fonctionnement, FAIRE VALIDER.
Stateflow | Ouvrir un chart | Représenter un état | Représenter une transition | Apporter des commentaires | Utiliser des opérateurs logiques | Effectuer des comparaisons | Établir une temporisation |
Validation par le professeur : ![]()
REPRODUIRE ci-dessous le rectangle état SIGNALISATION.
Remarque : l'arceau est en mouvement quand la vitesse est différente de zéro, il est à l'arrêt quand la vitesse est nulle.