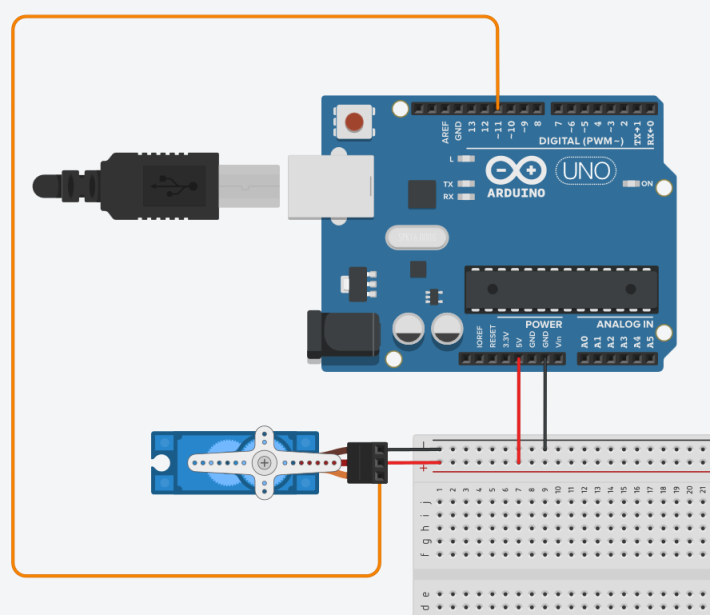
Utilisation d'un servomoteur
Remarque : Servomoteur et PWM (MLI)
Lorsqu'on utilise Stateflow pour piloter une carte Arduino, l'utilisation du bloc Servomoteur va empêcher l'utilisation des broches 1 à 12 pour un pilotage en PWM.
Aussi, lorsqu'on est amené à utiliser un servomoteur et un moteur à courant continu piloté en Modulation par Largeur d'Impulsion (PWM), il est impossible d'utiliser une carte Arduino UNO. Dans ce cas, il faut utiliser une carte Arduino MEGA qui possède plus de broches.
Attention, c'est Matlab Stateflow qui impose cette restriction avec la carte UNO.
Un servomoteur (souvent abrégé en « servo », provenant du latin servus qui signifie « esclave ») est un moteur capable de maintenir une opposition à un effort statique et dont la position est vérifiée en continu et corrigée en fonction de la mesure.
C'est donc un système asservi. Le servomoteur intègre dans un même boitier, la mécanique (moteur et engrenage), et l'électronique, pour la commande et l'asservissement du moteur.
La position est définie avec une limite de débattement d'angle de 180 degrés, mais également disponible en rotation continue.

Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger la vidéo.