Fonctionnement de l'interface haptique
Une interface haptique est une interface homme-machine mais également une interface machine-homme.
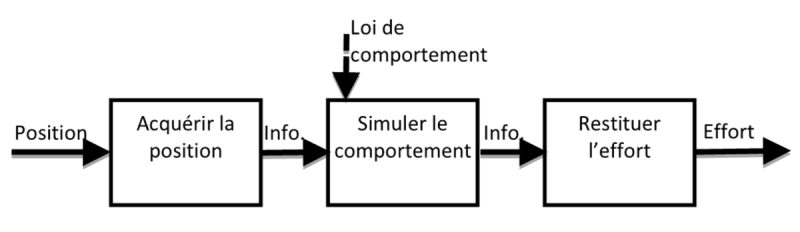
En effet, en plus d'acquérir des informations en provenance de l'utilisateur, telles que l'acquisition de position d'une manette, elle permet simultanément de restituer sous forme d'effort des informations à l'utilisateur, à l'instar des vibrations associées aux touches d'un clavier virtuel de téléphone ou des efforts associés à une manette (ou volant) à retour d'effort.
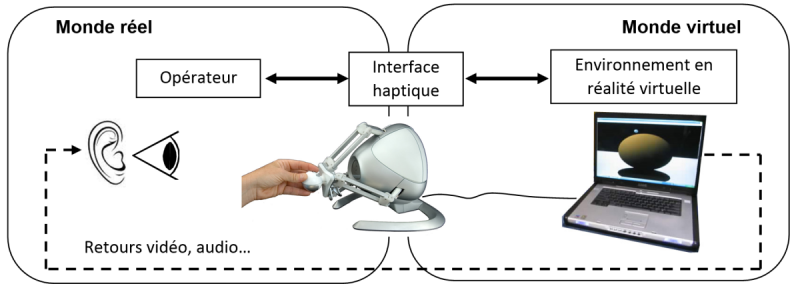
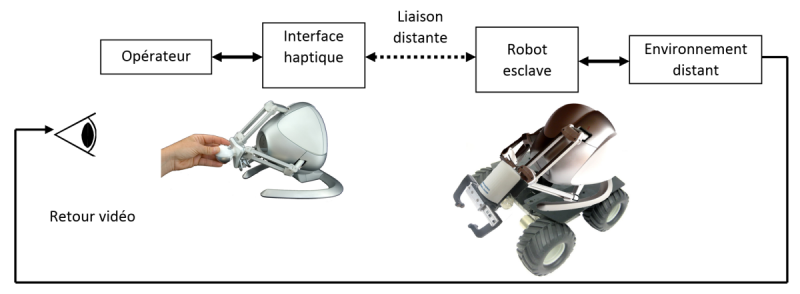
L'interface haptique peut être utilisée :
en interaction avec un environnement virtuel (jeu, apprentissage de gestes chirurgicaux, mise au point d'environnement de travail...) ;
ou en interaction avec un robot esclave (chirurgie à distance, télé-manipulateur de robot en environnement hostile...).
L'effort restitué est fonction de la position acquise, selon une loi de comportement qui doit refléter l'environnement virtuel ou le robot esclave.
Visionner la vidéo ci-dessous montrant plusieurs exemples de ces 2 types de fonctionnement :