Etude préliminaire
Résolution de position
Q1. À l’aide des données techniques fabricant (cf. diagramme des exigences du dossier technique) identifier celle correspondant à la performance d’acquisition de la position et donner sa valeur. Expliciter cette valeur.
Simulation
Activation du complément et ouverture de la maquette
Téléverser le dossier zippé sur le bureau et en extraire tout le contenu (cliquer droit sur le dossier et opter pour Extraire tout...). En fin de séance, effacer les DEUX dossiers (dossier zippé et dossier ordinaire).
Démarrer le logiciel SolidWorks.
Activer le complément "Meca3D".
Ouvrir le fichier « ROBOT_haptique_cinematique.SLDASM ».
Analyse du mécanisme
Cliquer droit sur "Analyse" et sélectionner "Calcul mécanique[1]".
Une fenêtre s'affiche[2] donnant des informations sur le mécanisme (nombre de cycles, hyperstatisme, nombre d'équations...).
Cliquer sur "Continuer".
Pour vérifier le bon fonctionnement dans un premier temps, faire une étude géométrique, pour 400 positions, avec la translation TX de la liaison glissière1 comme mouvement d'entrée et une amplitude de 1 pouce (valeur en m).
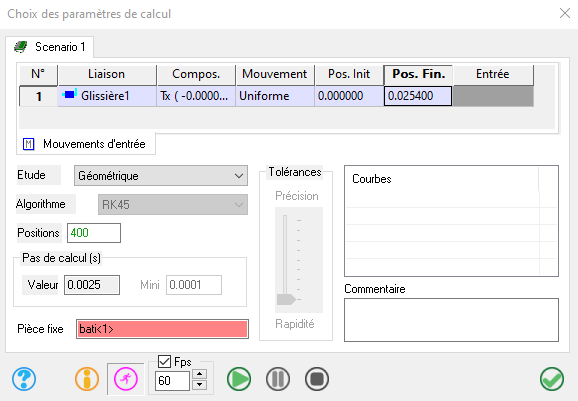
Lancer le calcul en cliquant sur ![]() . Valider en cliquant sur
. Valider en cliquant sur ![]() pour voir les résultats.
pour voir les résultats.
Simulation du fonctionnement du mécanisme
Lancer la simulation en cliquant droit sur « Résultats » et en sélectionnant « Simulation ».
Dans la barre de menu qui apparaît, cliquer « Animer » ![]() pour voir le résultat visuel. Cliquer sur « Arrêter » pour stopper l'animation et récupérer des résultats sous forme de graphes.
pour voir le résultat visuel. Cliquer sur « Arrêter » pour stopper l'animation et récupérer des résultats sous forme de graphes.
Le mécanisme s'anime. Visualiser l'animation. Changer le signe de la position finale au besoin si le mouvement ne se fait pas dans le bon sens.
Il est possible de visualiser des courbes donnant divers renseignements : vitesse, accélération, déplacement, ...
Visualisation des résultats
Pour trouver l'amplitude du déplacement du moteur, il faut visualiser les résultats.
Cliquer droit sur la liaison « Pivot moteur 1[3] ».
Sélectionner « Position » et « Rotation » et cliquer « Consulter » dans la fenêtre « Consultation de résultats[4] ».
Les résultats apparaissent dans une fenêtre identique à celle ci-contre.
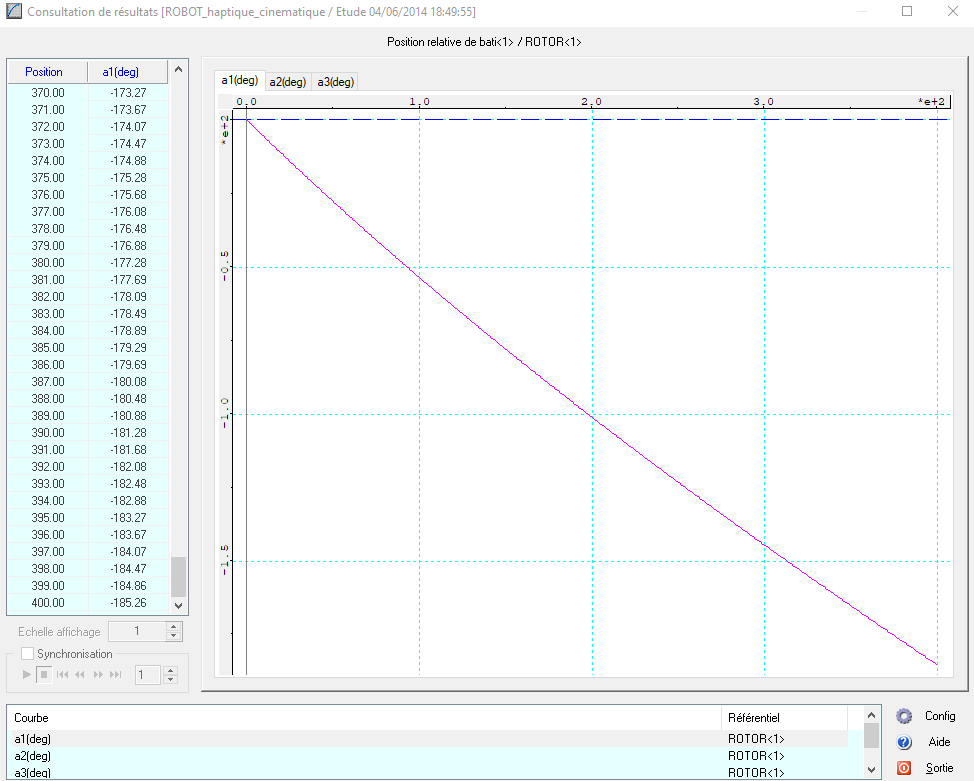
Q2. En déduire la rotation du moteur pour que l'effecteur se déplace d'un pouce. Déterminer alors la résolution angulaire minimale du moteur entre deux positions pour satisfaire la résolution minimale annoncée par le fabricant.