Présentation
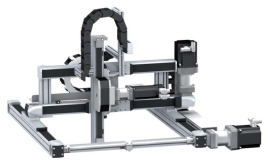
Le système industriel dont est extrait Control'X est un robot portique 3 axes Lexium Max R du constructeur Schneider Electric. Ce robot portique est constitué :
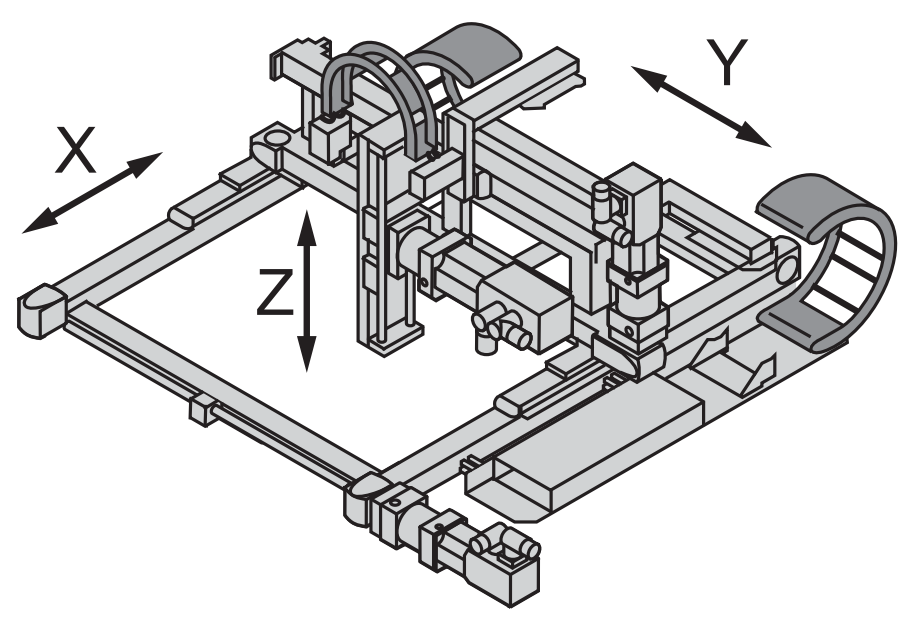
D'un axe portique double Lexium MAX S assurant un déplacement selon la direction X
D'un axe portique double Lexium MAX H assurant un déplacement selon la direction Y.
D'un axe Cantilever Lexium CAS 4 ou Lexium CAS 3 assurant un déplacement selon la direction Z.

Ce robot portique permet d'apporter une solution fiable pour la manipulation de charges sur de longues distances : selon le modèle, des charges jusqu’à 50 kg peuvent être déplacées jusqu’à 5500 mm en X, 1500 mm en Y et 1200 mm en Z. L’entraînement de chaque axe est assuré par courroie crantée. Les guidages des chariots se font au choix par galets ou billes à recirculation.
Ces robots portiques, commercialisés préassemblés, offrent différentes options de configuration pour chaque axe dont la longueur, le choix entre différentes tailles et types de profilés, le choix entre différents types de guidages …
Schneider Electric propose une offre globale constituée des portiques, de nombreux éléments de motorisation, des servovariateurs associés ainsi que des contôleurs de mouvement.



Les applications typiques de ces portiques relèvent du "pick and place", de la manutention, de la palettisation, du tri, de l'inspection/mesure de pièces, de l'étiquetage...

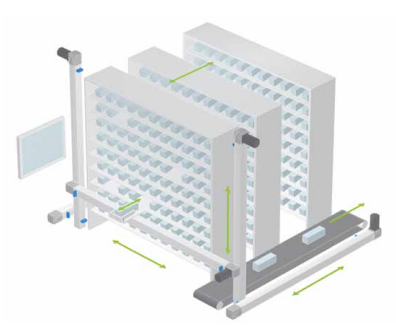


L'application choisie pour contextualiser Control'X et celle du "pick and place" dans le domaine du placement de composants électroniques. Il s'agit d'un processus de précision consistant à positionner des composants électroniques sur des circuits imprimés. Le coeur de la machine est un portique 3 axes avec moteurs et servovariateurs pour obtenir des mouvements hautement dynamiques et une précision maximale.
Dans ce contexte d'utilisation, la particularité mécanique tient au fait que les efforts résistants extérieurs exercés sur l'axe sont nuls : le moteur sert uniquement à vaincre les efforts inertiels ainsi que les résistances passives.
Le moteur est souvent en prise directe avec la poulie motrice ou, s'il y a un réducteur, le rapport de réduction est généralement faible.