Robot Haptique : Analyser le comportement d'un système asservi
contenu
menu
navigation
outils
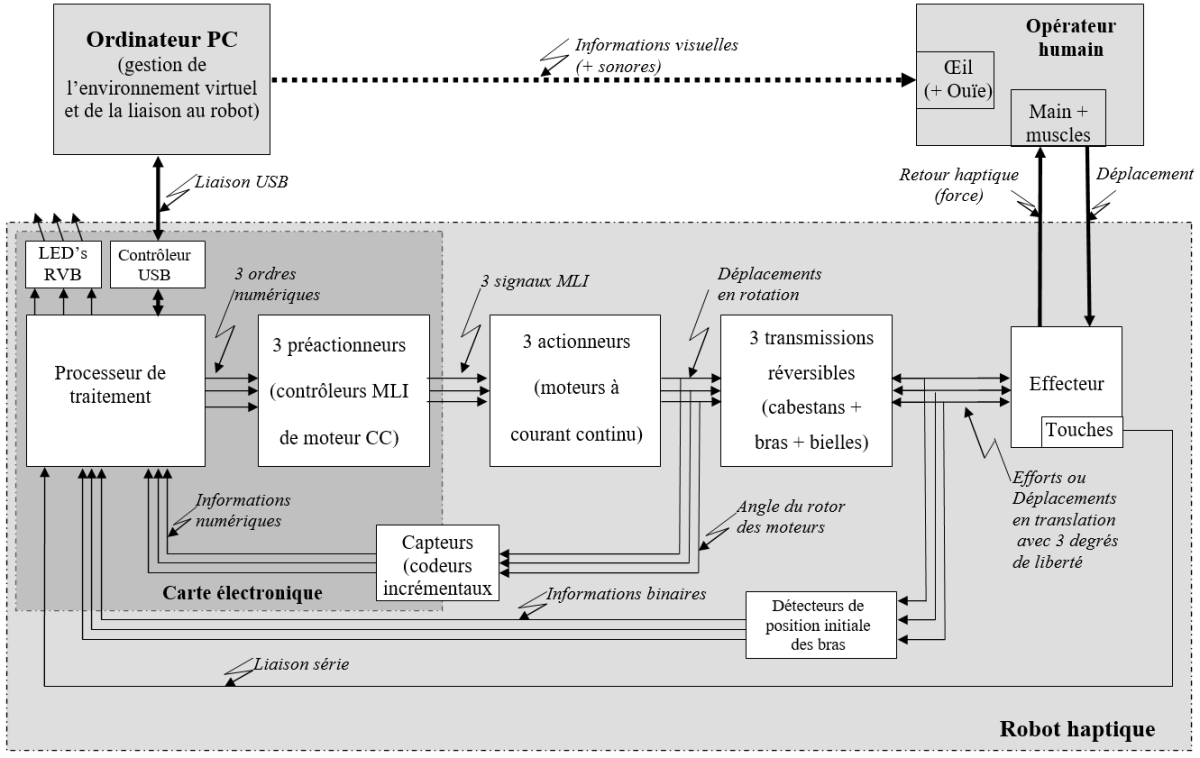
Schéma synoptique en mode « interface haptique »
Précédent
Suivant
Objectifs
Introduction
Asservissements
Dossier technique
L'haptique : généralités
L'interaction haptique
Mise en œuvre
Description comportementale
Présentation générale
Description structurelle
La chaîne d'information
Les 3 chaînes de puissance indépendantes
Approche matérielle
Description globale
Carte électronique principale
Schéma synoptique
Préactionneur
Actionneur
Transmetteur
Capteur
Accueil
Module