Instrumentation
En plus des éléments existants sur le système commercialisé, le système du laboratoire a été instrumenté (rajout d'éléments).
Les deux chaînes de puissance d'origine, fonctionnent avec des relais, distribuant une puissance en "tout ou rien".
Afin de créer un asservissement de vitesse du gabarit, ainsi qu'un asservissement de position de la trappe :
les relais ont été remplacés par un hacheur, modulant une puissance aux 2 chaînes de puissance ;
le moteur synchrone du sous-ensemble gabarit a été remplacé par un moteur à courant continu ;
deux codeurs incrémentaux à effet Hall ont été ajoutés (le premier pour mesurer la vitesse angulaire du gabarit, et le deuxième pour mesurer la vitesse angulaire de l'axe moteur de la trappe).
Cliquer sur l'image ci-dessous pour l'agrandir.
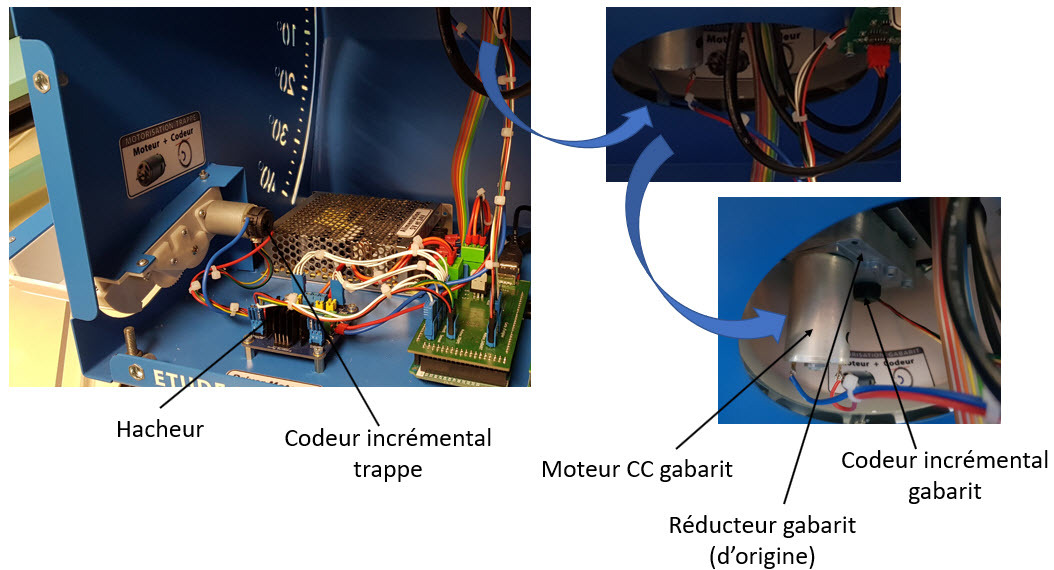
On peut remarquer que le codeur incrémental à effet Hall de la trappe est monté sur l'axe du moteur trappe alors que le codeur incrémental à effet Hall gabarit est monté sur l'axe de sortie du réducteur de vitesse gabarit.
Par ailleurs, afin d'enregistrer plusieurs grandeurs physiques, un capteur analogique et prises de mesure ont été installés. Ces éléments supplémentaires sont :
1 accéléromètre qui permet de mesurer l'accélération linéaires selon 3 axes orthogonaux ;
un accès aux grandeurs électriques tension et intensité des deux moteurs électriques à courant continu.

Enfin :
1 carte Arduino Mega 2560 assure les relevés des différents capteurs ;
1 carte Rasberry traite ces relevés.