Exercice : Commande d’un vérin
Hypothèses
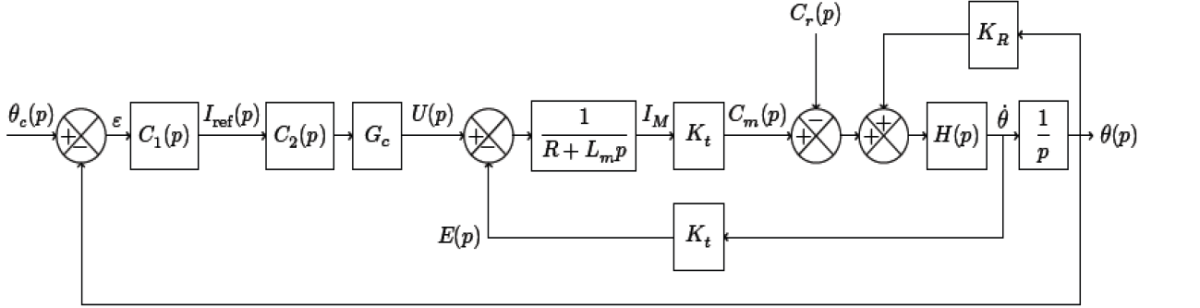
La consigne de position est de 60°
La constante de conversion de la consigne en courant est : \(C_1=1\) A/rad
La constante du correcteur : \(C_2=1\) rad/A
\(I_{ref}\) étant la consigne en courant du moteur.
Le correcteur Proportionnel sera choisi égal à 1
Le Hacheur génère une tension grâce à sa constante de tension \(G_c=24\) V/rad
La résistance Interne du moteur vaut : \(2,4\, \Omega\)
L’inductance du moteur vaut \(L_m=15\) H
On supposera que le couple résistant est très faible \(C_r=10^{-4}\) Nm
\(K_r\) constante de couple vaut 0,01Nm/rad
La fonction transfert du mécanisme \(H(p)=\dfrac{1}{J_{eq}.p+f_{eq}}\) avec \(J_{eq}=2,82 \, kg.m^2\)et \(f_{eq}=0,14 \, N.ms^{-1}\)
La constante de Couple \(K_t=9,5 \, V/rad\,s^{-1}\)
Question
Ecrire la FTBO de la chaine ci-dessus sans tenir compte des perturbations en fonction des paramètres \(C_1,~C_2,~G_c,~R,~L_m,~ K_t,~\text{et}~ K_r\).
Question
Ecrire la FTBF de la chaine ci-dessus sans tenir compte des perturbations en fonction des paramètres \(C_1,~C_2,~G_c,~R,~L_m,~ K_t,~\text{et}~ K_r\).
Question
Ecrire la FTBF de la chaine ci-dessus en tenant compte des perturbations et des corrections en fonction des paramètres \(C_1,~C_2,~G_c,~R,~L_m,~ K_t,~ K_r~\text{et}~ C_r\).
Question
Modéliser le schéma bloc ci-dessus dans Matlab Simulink.
Question
Vérifier vos résultats de la question 3 à l’aide d’une simulation dans Matlab.