Exercice : Modèle acausal
Un moteur à courant continu est un actionneur qui transforme de la puissance électrique en puissance mécanique
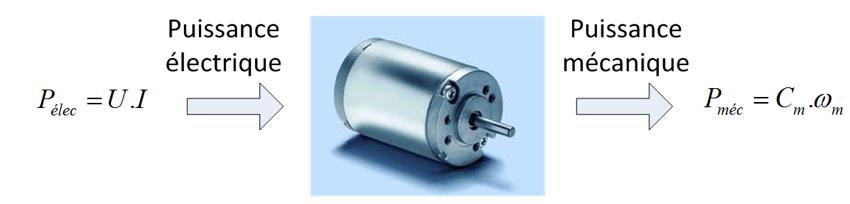
La modélisation du moteur à courant continu fera intervenir 2 domaines : Electrique et Mécanique
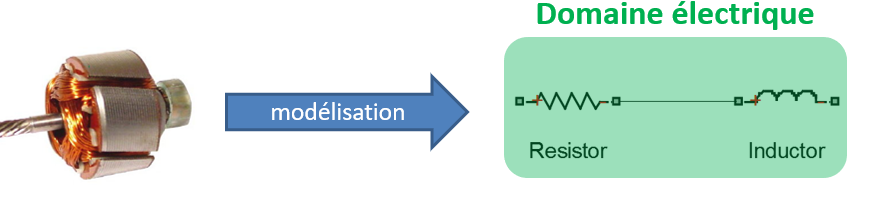
L’induit du moteur est modélisé par une inductance en série avec sa résistance
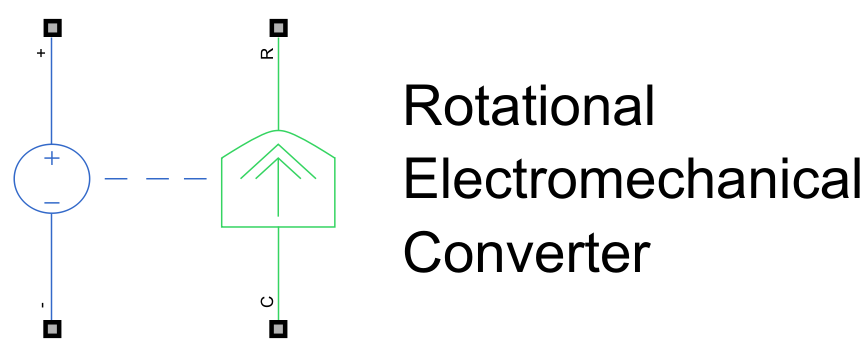
L’alimentation est modélisée par une source de tension parfaite

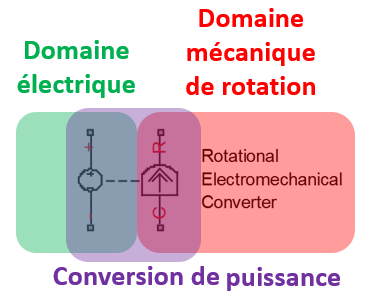
La conversion de puissance électrique en puissance mécanique est modélisée par :
Fonction du composant | Représentation | Bibliothèque |
|---|---|---|
Rotational Electromechanical Converter |
| Simscape / Fondation Library / Electrical / Electrical Elements |
L’inertie de l’arbre moteur est modélisée par le composant suivant :
Fonction du composant | Représentation | Bibliothèque |
|---|---|---|
Inertia |
| Simscape / Fondation Library / Mechanical / Mechanical Elements |
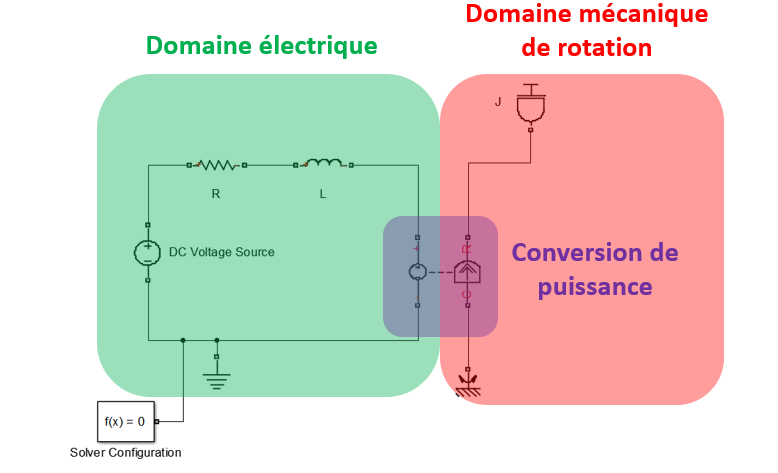
Ci-contre le modèle que l’on souhaite obtenir :
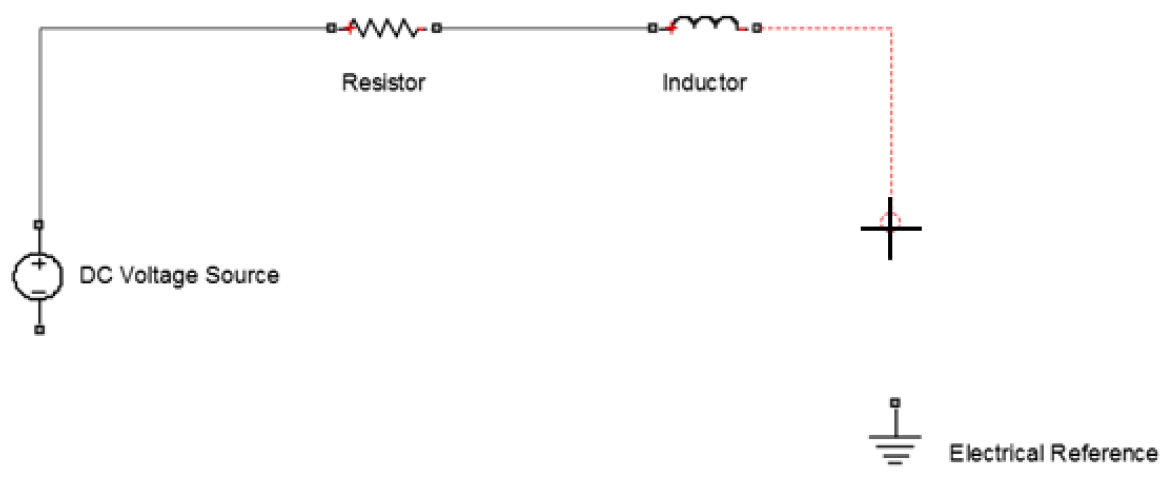
Mise en place des composants côté électrique (R, L, source de tension et référence électrique). Pour cela, effectuer un glisser-déposer des composants suivant la bibliothèque Simscape.
Fonction du composant | Représentation | Bibliothèque |
|---|---|---|
Source de tension continue |
| Simscape / Fondation Library / Electrical / Electrical Sources |
Résistance |
| Simscape / Fondation Library / Electrical / Electrical Elements |
Inductance |
| Simscape / Fondation Library / Electrical / Electrical Elements |
Référence électrique |
| Simscape / Fondation Library / Electrical / Electrical Elements |

Pour relier les composants par des connexions du domaine électrique
Fonctions | Actions | Raccourcis clavier |
|---|---|---|
Relier deux composants | Clic gauche sur le port du premier composant puis se déplacer en maintenant le bouton gauche enfoncé jusqu’au port du second composants | Pas de raccourci clavier pour cette action |
Rajouter le Rotational Electromechanical Converter et l’inertie de l’arbre moteur (bloc Inertia)
Faire les connexions et mettre en place le solveur
Paramétrage des composants par un double clic sur les blocs
Mettre les valeurs suivantes : R = 2Ω - L= 2mH – source tension 24V – J = 5.10-2 kg.m² - k = 0.8 V/rd/s
Maintenant que le modèle est terminé, nous allons placer les capteurs pour l’exploiter :
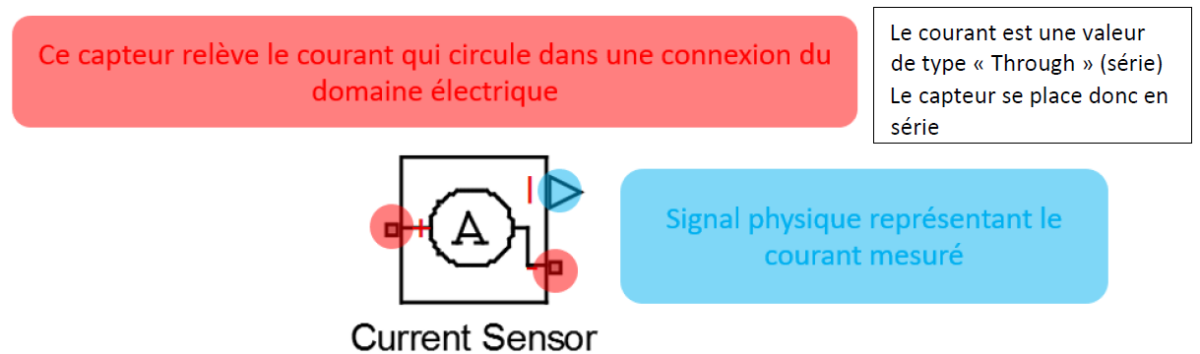
Un capteur de courant pour mesurer le courant d’induit du moteur
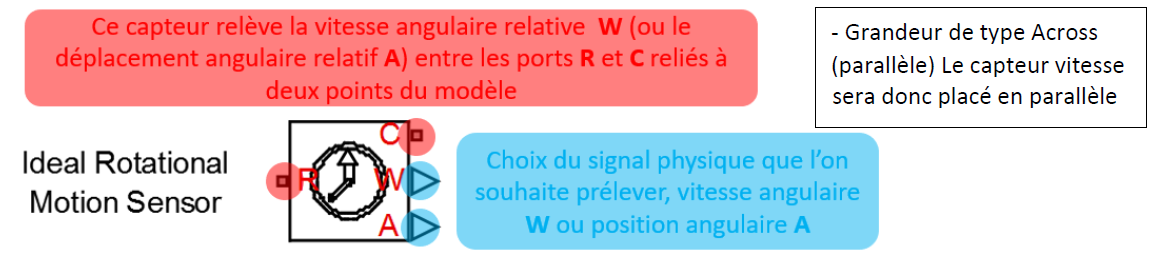
Un capteur de vitesse pour mesurer la vitesse de rotation du moteur
Placement du capteur de courant (Simscape/Foundation/Library/Electrical/Electrical Sensor)
Placement du capteur de vitesse (Simscape/Foundation/Library/Mecanical/Mechanical Sensor)
Ci-dessous le modèle que vous devez obtenir en plaçant les Scopes (Simulink/Sinks)
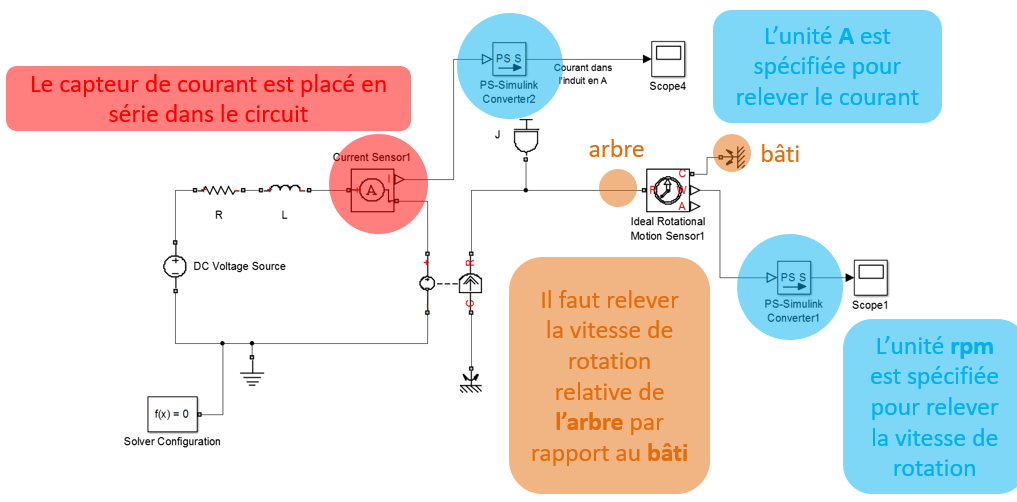
Relever le courant dans l’induit à vide (il n’y a pas de couple) et la vitesse de rotation du moteur
On rajoute maintenant un frottement visqueux. Pour modéliser ce phénomène, on va placer le composant suivant :
Fonction du composant | Représentation | Bibliothèque |
|---|---|---|
Rotational Damper |
| Simscape / Fondation Library / Mechanical / Rotational Mechanical Elements |
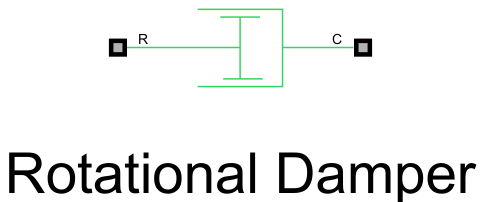
Ce composant possède 2 ports de type RC (R : Rotor et C : Cage)
Il modélise un effort résistant exercé par le stator sur le rotor
Le port R sera relié au rotor et le port C sera relié au stator
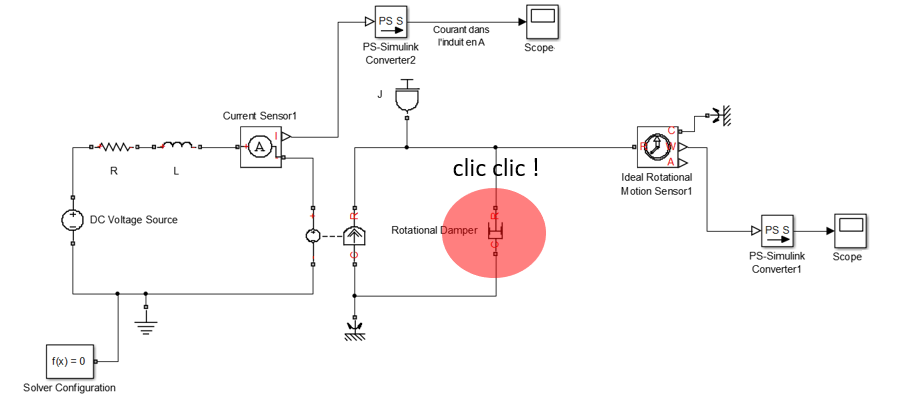
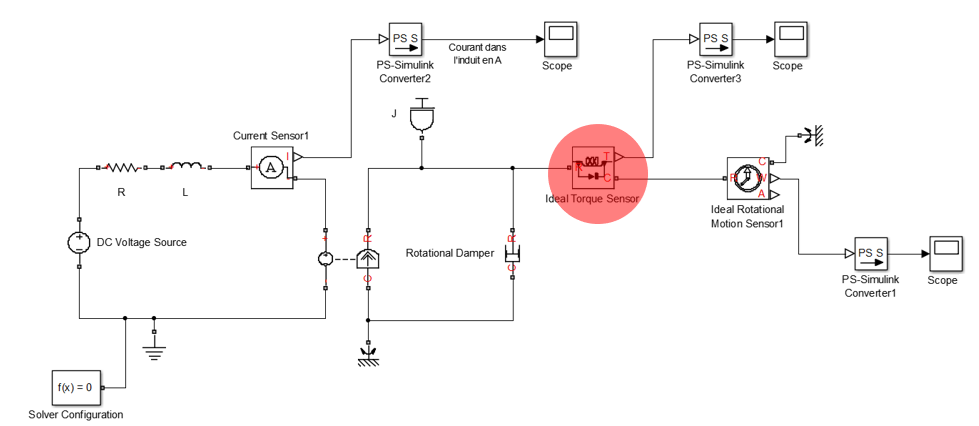
Relever le courant dans l’induit avec frottement visqueux et la vitesse de rotation du moteur
On souhaite mesurer le couple moteur disponible. Pour cela, on utilise un capteur de couple type « Through »
Fonction du composant | Représentation | Bibliothèque |
|---|---|---|
Ideal Torque Sensor |
| Simscape / Fondation Library / Mechanical / Mechanical Sensor |
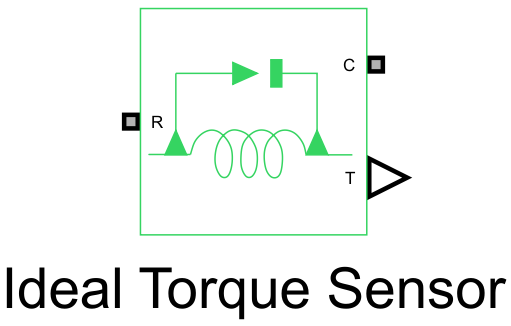
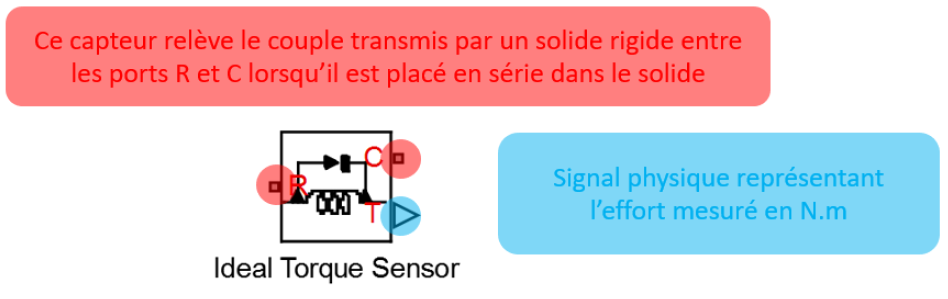
Si on relève le couple, on remarque qu’il est nul car les points C et R appartiennent tous les 2 à l’arbre moteur en mouvement et aucun couple ne se transmet de R sur C. La solution est de bloquer l’arbre moteur. Cela revient à placer le capteur de couple entre un point de l’arbre et un point fixe du modèle comme le bâti
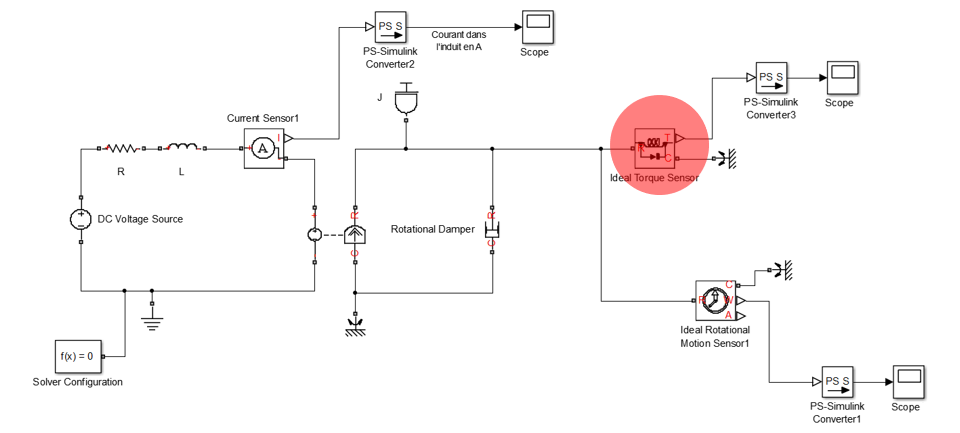
Relever le couple moteur.et le courant dans l’induit. La vitesse de rotation est nulle car l’arbre moteur est bloqué
Cet exemple montre à quel point la parfaite compréhension des méthodes de placement des capteurs est primordiale. Un mauvais placement entraînera un comportement erroné du modèle.