d - Exploitation de la simulation pour l'avance du robot
Comment exploiter le modèle ?
Les informations que l'on peut obtenir du modèle. ( dimensions du chariot considérées comme fixes sauf spécifications contraires)
- Sur du plat pour une masse totale de 2.5kg quelle est la vitesse du robot pour 2 roues motrices ou bien 4 ?
- Peut il gravir la pente fixée par le cahier des charges ? avec 1 puis 2
- Quelle serait la pente maximale que le robot pourrait gravir avec 2 moteurs au total?
- Quel est le problème de la mise sous tension des moteurs à courant continu vis à vis des grandeurs électriques que devra fournir ensuite le modulateur ? Et si votre Modulateur n'accepte pas plus de 12V et 1A en valeurs maximales ( il suffira de changer la valeur initiale pour la pente à 6 au lieu de 0.6V)
- Quel est l'impact des roues sur la vitesse et pour gravir une pente ?
- Dans le cas où le centre de gravité n'est plus central (D1=D2= 70mm ) mais avec D1= 0.75x D2 ( et en laissant D1+D2= 140mm) en pente, comment se comporte le modèle de simulation donné ?
La modélisation va pouvoir nous donner des informations sur le comportement du système dans les limites du modèle créé. sans oublier de prendre quelques relevés documentés
SOYEZ METHODIQUE : il y a beaucoup de paramètres à gérer ! Et ne changer qu'un paramètre à la fois pour juger des effets
Conseil : Avant toute chose
Par des essais de simulations, indiquer quels sont les effets :
de la pente à gravir sur les grandeurs électriques,
de la tension d'alimentation (étant croissante), sur la partie mécanique et sur l'intensité du courant que devra fournir le modulateur.
du diamètre des roues.
l'énergie consommée
=>Conditions pour être conforme au cahier des charges avec le motoréducteur proposé sur le dimensionnement du robot, Quel sera le moteur qui serait le plus adapté ?
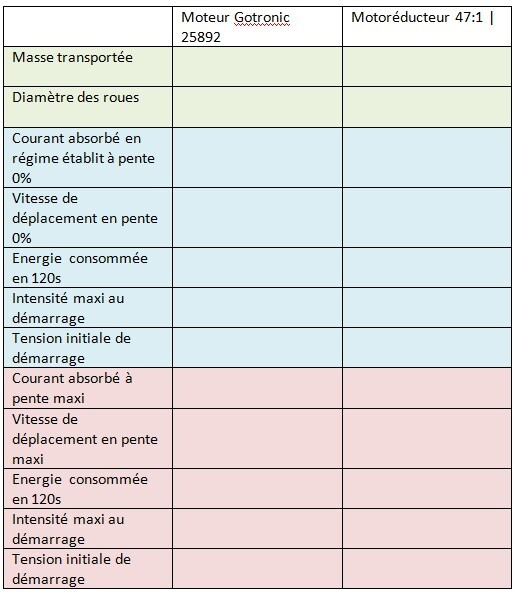
Le tableau ci-dessus vous permettra de compléter les valeurs obtenues pour respecter le cahier des charges. On prendra une durée de fonctionnement de 2min.