a- Motorisation de la propulsion
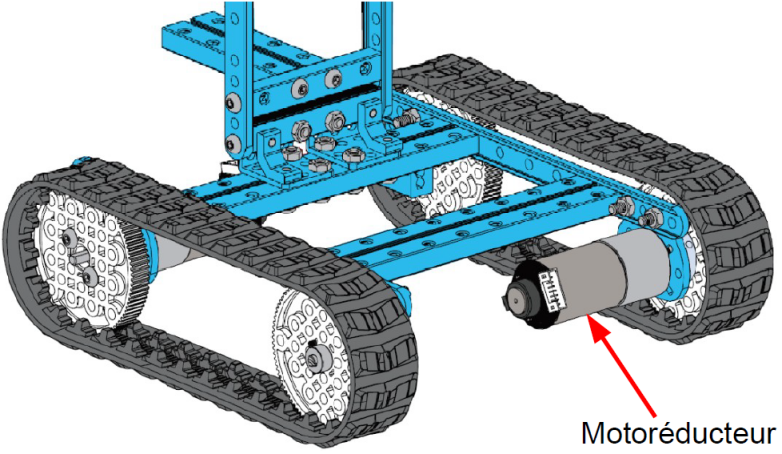
L'activité consiste à justifier le choix des deux motoréducteurs pour propulser le robot secouriste, de préciser les valeurs de cette partie de la chaîne de puissance.

Travail à faire :
1- Dimensionnement du motoréducteur
Le choix de cette solution technique, qui vous est imposée pour la suite du travail, permet de valider une solution classique et de vérifier des calculs.
Données :
La vitesse de déplacement linéaire désirée du robot est de 2 km·h-1
La pente maxi à gravir est de 45%
La masse maxi du robot secouriste doit être de 2 kg
![]() CONVERTIR la pente en angle.
CONVERTIR la pente en angle.

![]() CALCULER la puissance dissipée par le robot secouriste pour vaincre la pente « Pu ».
CALCULER la puissance dissipée par le robot secouriste pour vaincre la pente « Pu ».
| Besoins énergétiques d'un véhicule |
![]() DÉTERMINER la puissance en sortie d'un motoréducteur « Pm ».
DÉTERMINER la puissance en sortie d'un motoréducteur « Pm ».
| Besoins énergétiques d'un véhicule |
![]() CALCULER la vitesse de rotation de la roue « ω » ainsi que sa fréquence de rotation en sortie du motoréducteur « N ».
CALCULER la vitesse de rotation de la roue « ω » ainsi que sa fréquence de rotation en sortie du motoréducteur « N ».
| Transformation d'une vitesse linéaire en vitesse de rotation |
![]() CALCULER le couple moteur « Cm ».
CALCULER le couple moteur « Cm ».
| Couple moteur |