La propulsion du robot secouriste.
L'objectif de cette partie est de concevoir une structure de propulsion pour animer le robot dans les différents environnements cités dans le diagramme d'exigence.
La démarche globale consiste à :
Réaliser un assemblage réel avec les éléments de la bibliothèque MAKEBLOCK®
Réaliser la maquette numérique correspondante.
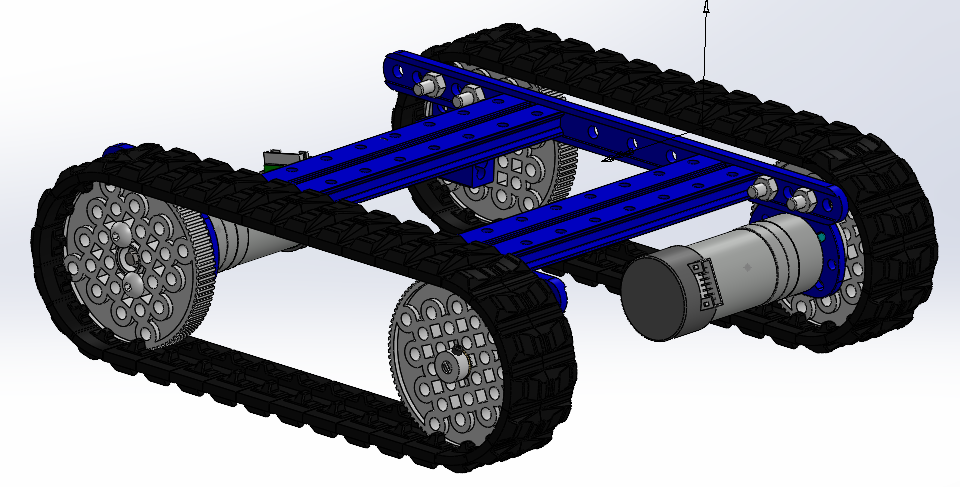
La finalité est d'aboutir au résultat ci dessous.