Exercice : Comment contrôler la trajectoire du robot ?
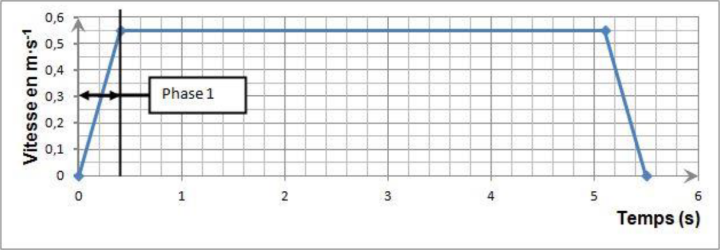
Le robot aspirateur doit suivre la loi de vitesse simplifiée suivante pour un déplacement en ligne droite.
Question
Q5 \ À partir de la figure 3, indiquer la nature du mouvement pour la phase 1. Déterminer l'accélération « a » du robot lors de cette phase de démarrage.
Indice
Accélération : \(\mathbf{\Large{t = \frac{v}{a}}}\) avec \(\left\lbrace\begin{array}{lll} t\text{ : temps (s)}\\\text{v : vitesse linéaire }(m·s^{-1})\\a \text{ : accélération }(m·s^{-2})\end{array} \right.\)
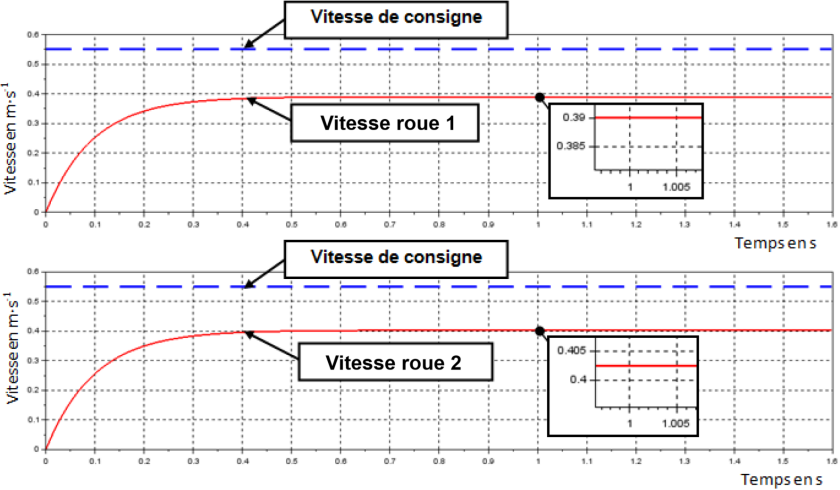
Un essai de déplacement en ligne droite est mis en oeuvre. Une modélisation du fonctionnement en chaîne directe (figure 4) est réalisée sur les roues motrices pour les deux chaînes de puissance (moteurs M1 et M2). Des perturbations modélisées par des frottements visqueux (proportionnels à la vitesse de rotation) différents sur chaque roue dus aux divers composants (réducteur, etc.) sont appliquées et donnent la simulation figure 5.

Question
Q6 \ À l'aide de la simulation figure 5, relever les vitesses linéaires des roues en régime établi (m·s-1).
Question
Q7 \ À l'aide de la simulation figure 5, déduire les conséquences des perturbations sur la vitesse des roues et la trajectoire de déplacement du robot. Proposer une solution qui permet de remédier à ce problème.
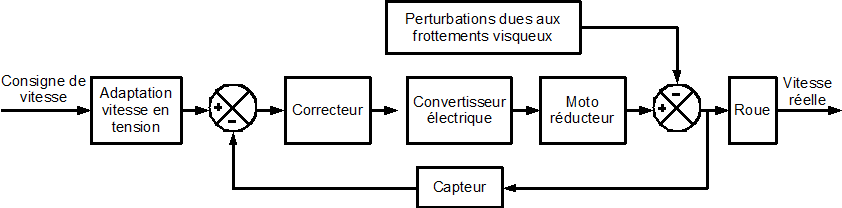
La mesure de l'angle de rotation moteur, et donc indirectement de la vitesse, est obtenue par des codeurs incrémentaux. Une régulation en vitesse et l'ajout d'un correcteur proportionnel sont réalisés. Un modèle dont le schéma de principe est donné figure 6 permet d'obtenir la simulation figure 7.
Question
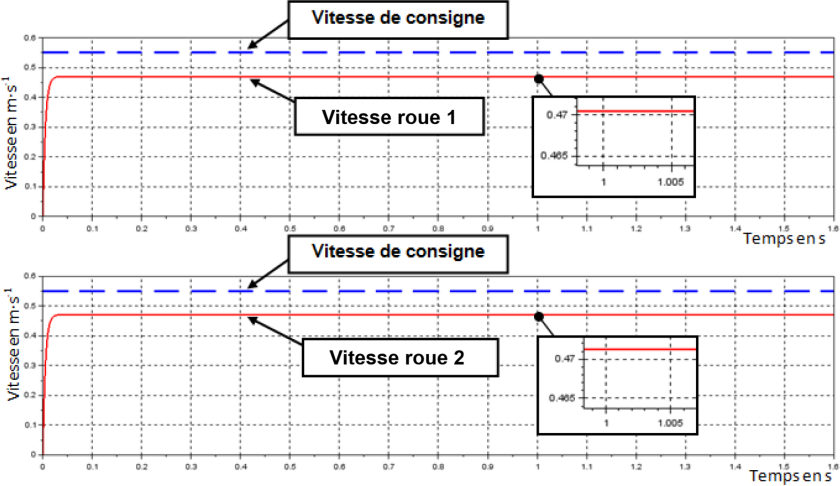
Q8 \ À partir de la simulation figure 7, déterminer les écarts pour les vitesses des roues 1 et 2 entre le modèle simulé et l'exigence attendue.
Indice
Erreur statique représente la différence entre la consigne et la valeur finale du système. Exprimée en %.
\(\color{red}\boxed{\color{black} \mathbf{ \large {\epsilon_{\text{ %}}=\left| \frac{\text{valeur finale - consigne}}{\text{consigne}} \right|\times 100}}}\)
Question
Q9 \ Expliquer l'intérêt d'avoir utiliser une régulation avec correcteur proportionnel.