Capacité globale et rayon d’action du robot
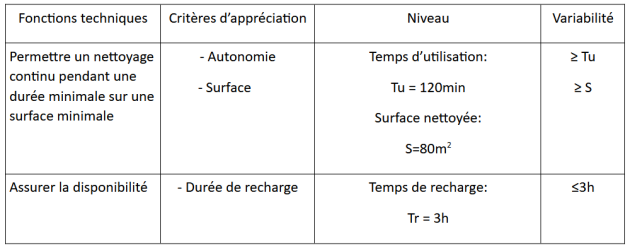
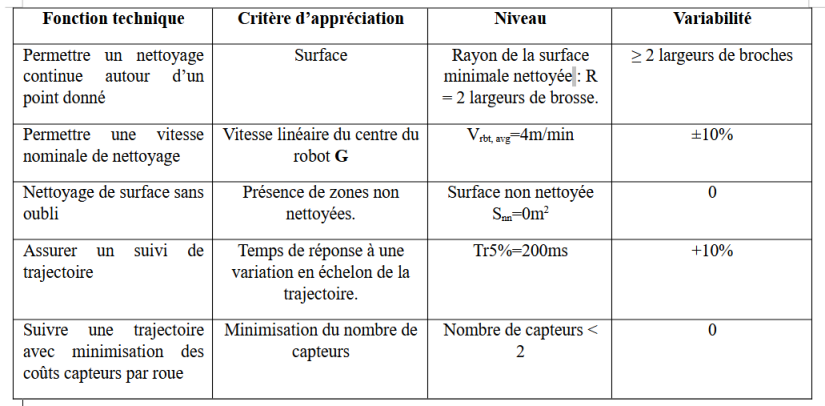
Cet aspirateur autonome possède certaines caractéristiques fournies par le constructeur aux clients potentiels. Celles-ci sont présentées dans le Tableau ci-dessous.
Question 1 : Quels sont les différences entre un aspirateur autonome et aspirateur classique ? Citer les avantages du robot aspirateur.
Données techniques du robot :
- Vitesse de déplacement moyenne du robot Vrbt, avg=4m·min-1
- Vitesse de déplacement maximale du robot Vrbt, avg=18m·min-1
Alimentation par une batterie d’accumulateur Ni-MH de 14,4 V ; 3300 mAh

Motorisation des roues :
Le robot comporte deux ensembles moteur-roue indépendants.
Pour chaque ensemble moteur-roue :
- Diamètre de roue D = 60mm
- Vitesse de rotation moteur sous 14.4 V=8000tr·min-1
- Réducteur multi étage rapport de réduction k=80
- Courant moyen consommé en fonctionnement par roue Ir,avg=500mA. Le revêtement des roues assure une transmission parfaite du couple moteur sur le sol.

Motorisation des brosses :
Le courant moyen consommé par la motorisation des broches est évalué à Ibr,avg = 150mA

Motorisation du balai :
L e courant moyen consommé par la motorisation des broches est évalué à Iba,avg = 70mA
- Le courant moyen consommé par l’électronique embarqué est de (microcontrôleur, pilotage, des variateurs, capteur) est évalué à Iein,avg=130mA.
- La largeur de nettoyage vaut Lvoie=300mm.
- Le rendement surface nettoyée/ surface parcourue vaut µsn/sp = 66%.

Dock de rendement : Station de rechargement pour batterie d’accumulateur 14.4V. Courant Ich =1.5A.
Question 2 : A partir des données du constructeur du robot, calculer le courant moyen total It consommé par le robot.
Question 3 : En déduire la capacité en mAh nécessaire pour alimenter le robot pendant le temps d’utilisation Tu fourni par le constructeur.
Question 4 : Calculer la vitesse approximative de rotation des moteurs Nmot en tr·min-1 pour un déplacement du robot Vrbt, max= 18m·min-1.
\(\mathbf{\large{N_{mot}= k \times N_{roue} = k \times \frac{V_{rbt max}}{\pi \times D}}}\)
Question 5 : Calculer la surface nettoyée pendant Tu à la vitesse moyenne du robot Vrbt, avg= 4m·min-1.
Formule : Surface nettoyée = Vrbt, avg x Tu x Lvoie x rendement
Question 6 : Calculer le temps de recharge complet si la charge résiduelle de la batterie d’accumulateur est de 10%. On estime le rendement de la charge à 80%.
Question 7 : A l’analyse des résultats obtenus aux questions précédentes, les caractéristiques de ce robot sont-elles respectées? conclure.