Prédire un fonctionnement
La structure matérielle est définie, qu'il s'agisse de la chaîne d'énergie ou de la chaîne d'action (aussi appelée Partie Opérative ou P.O.). La chaîne d'information en revanche reste à finaliser, tant du point de vue de la logique de commande proprement dite que des choix relatifs à son implémentation[1] (carte à micro-contrôleur, langage, besoins en mémoire, nombre d'entrées/sorties,...).
Exemple : Automatisme de Portail
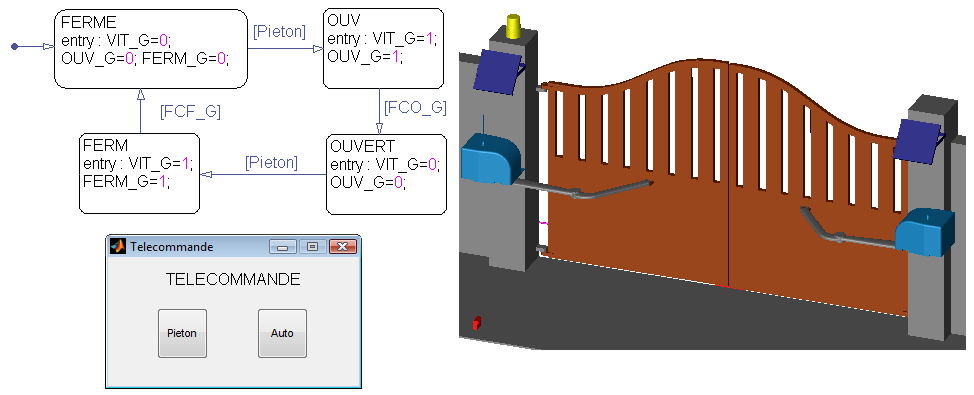
Le modèle permet de visualiser simultanément l'évolution des états de la commande et de la Partie Opérative. Du point de vue de la P.O., le modèle comprend donc :
des blocs de comportement (non visibles ci-dessous)
des fichiers d'apparence, hérités d'une conception sur modeleur 3D
L'utilisateur du modèle dispose aussi d'une télécommande virtuelle, à l'image de celle qui sera livrée avec le produit fini commercialisé.
La simulation doit permettre dans ce cas la mise au point de la logique de commande au regard des :
exigences clients (conception au plus juste)
contraintes normatives et réglementaires
cas de figure anormaux et situations extrêmes (blocage du mécanisme, sécurité des personnes,...)
Remarque : Logique de commande
La logique de commande est ici formalisée, au sein même du logiciel de simulation, par le biais d'un éditeur (Matlab Stateflow) spécialisé de diagrammes états-transitions (diagrammes SMD SysML).
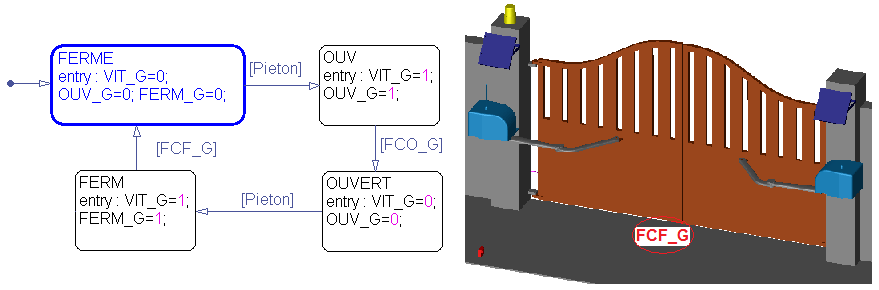
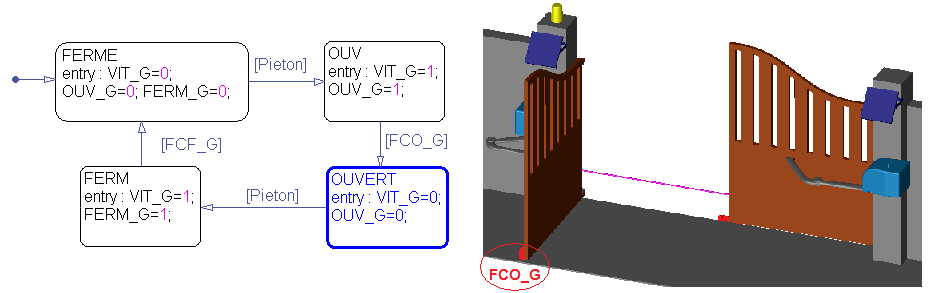
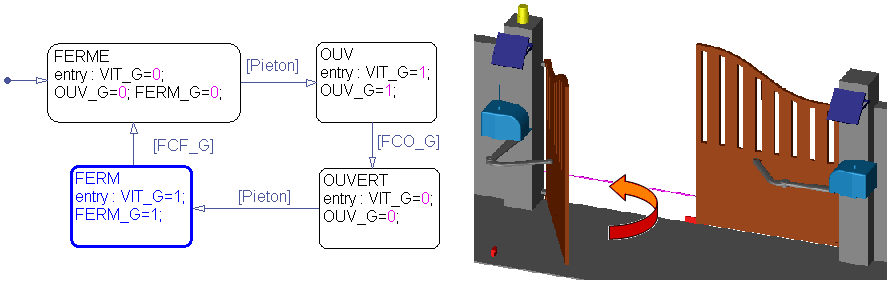
Exemple : Automatisme de Portail - Séquence d'ouverture pour un accès piéton
Au début de la simulation, les deux vantaux du portail sont fermés. La logique de commande est dans l'état « FERME »
. Le seul événement susceptible d'engendrer une évolution de la P.O. est « [Pieton] »
.
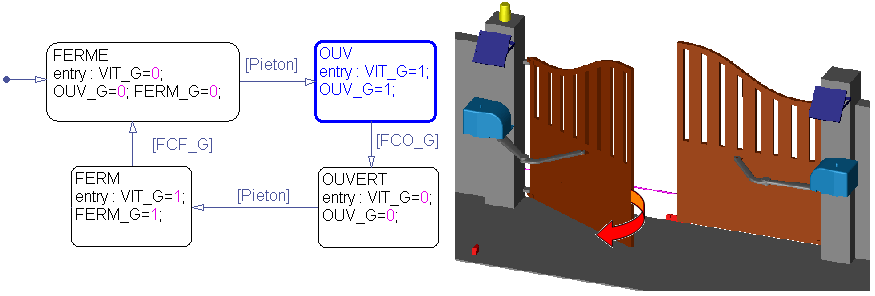
Pour conclure, le fonctionnement prédit semble donner satisfaction au concepteur qui peut alors se lancer dans la réalisation d'un prototype.
D'autres développements peuvent être envisagés, en jouant par exemple sur la vitesse, en début et fin de course, pour éviter les à-coups mécaniques...
Remarque : Automatisme de portail - Mode Auto
Il conviendrait aussi d'élaborer la logique de commande se rapportant au mode Auto, en veillant à rendre exclusif le choix entre les modes.
Complément : Implémentation du code
La logique de commande mise au point par le biais du modèle peut ensuite être implémentée[1] dans une cible (carte à micro-contrôleur).