Représentation d'un modèle de comportement
Un modèle de comportement se présente sous la forme d'un assemblage cohérent de symboles graphiques puisés dans les bibliothèques de différents domaines : électrique, mécanique,...
En plus des constituants du système, ces symboles représentent :
des sources, sollicitations externes du modèle
des capteurs permettant de prélever de l'information sur des grandeurs physiques
des indicateurs permettant l'affichage dans un format adapté (évolution temporelle, résultat numérique,...) des résultats de la simulation (données brutes ou pré-traitées)
Remarque : Logiciels

Les différents éléments de modèle représentés ici sont tirés du logiciel Matlab (Mathworks) et en particulier des bibliothèques de Simulink et de Simscape. D'autres logiciels existent sur le marché : MapleSim, SinusPhy, ...
Remarque : Organisation du modèle - IBD
Une manière efficace d'organiser le modèle est de regrouper les symboles en « subsystem »
, « block »
conformes au diagramme de blocs internes (IBD) lui même élaboré lors de la décomposition fonctionnelle du système.
Ceci permet également de masquer à l'utilisateur des détails du modèle qui en ralentiraient l'appropriation.
Exemple : Modèle Moto-réducteur
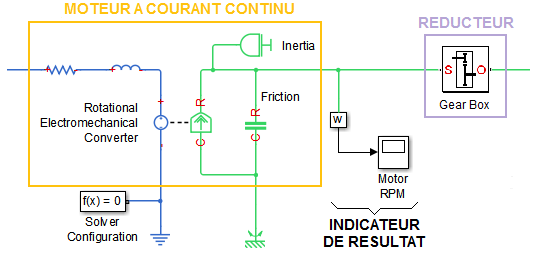
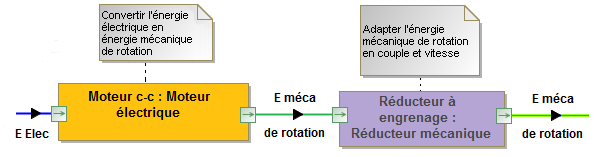
L'extrait de modèle ci-dessus représente un moteur à courant continu associé à un réducteur mécanique. Ci-dessous l'extrait d'IBD correspondant, qui décrit le système réel, non instrumenté. En toute logique, l'indicateur de résultat et le Solver (méthode de résolution des équations) présents dans le modèle, ne se retrouvent donc pas dans le diagramme de blocs internes.
Paramètres internes
Le symbole graphique n'est rien sans le(s) paramètre(s) qui permettent de caractériser le constituant. On y accède par le biais d'une boite de dialogue, à renseigner.
Cela suppose de connaître parfaitement les caractéristiques des constituants mis en œuvre, on les trouve généralement dans les documentations constructeurs mais parfois il faut aussi procéder à des expérimentations (processus d'identification).
Le symbole masque un comportement écrit sous la forme d'équations physiques (code source).
Exemple : Réducteur mécanique
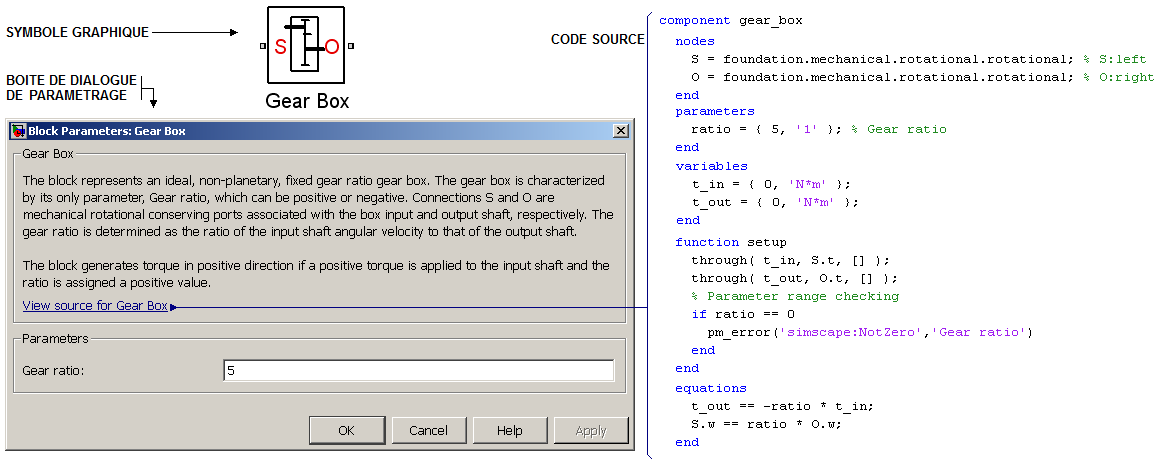
Le réducteur mécanique ci-dessus (considéré comme parfait, c'est à dire ayant un rendement égal à 1) est défini par sa réduction (rapport des vitesses angulaires : vitesse angulaire en entrée sur vitesse angulaire en sortie).
La boîte de dialogue (à laquelle on accède en cliquant sur le symbole graphique) est renseignée avec une réduction par défaut de 5.
Le symbole fait apparaître deux connexions, qui représentent les arbres d'entrée (S) et de sortie (O).
La section « equations »
du code source donne la relation entre le couple de sortie et le couple à l'entrée.
Types de variables
Les variables que traite le modèle peuvent être de type :
potentiel (across) : c'est à dire égales sur toutes les branches d'un noeud
flux (trough) : leur somme est nulle en un noeud
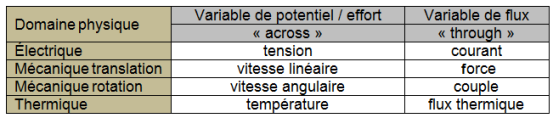
Le tableau ci-dessus recense les variables de potentiel et de flux pour les principaux domaines physiques.
Se souvenir que - pour un domaine donné - le produit d'une variable de potentiel par une variable de flux exprime une puissance.
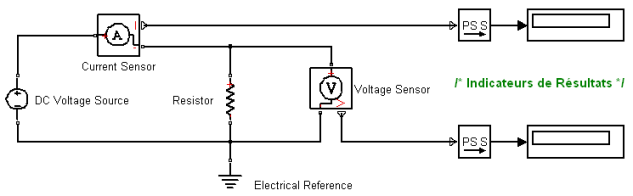
Exemple : Domaine électrique
Une résistance (Resistor) est alimentée par une source de tension continue (DC voltage Source).
La variable de flux est le courant, plus exactement l'intensité du courant, qui se mesure avec un appareil de mesure placé sur une branche (Current Sensor).
la variable de potentiel est la tension (différence de potentiel) dont la mesure s'effectue avec un appareil de mesure (Voltage Sensor) placé entre une branche et la référence du domaine, ici la masse, potentiel nul.
Le produit tension fois courant est bien homogène à une puissance.
Complément : Constituants non présents en bibliothèque
Les bibliothèques peuvent être enrichies avec des constituants nouveaux ou dérivés de symboles natifs.
On peut par exemple souhaiter disposer d'un réducteur non idéal ayant un rendement plus réaliste que 1!