Activité 3 : Pilotage robot
Conseil :
Charger, de la fenêtre Matlab, le fichier seq6activite3.slx
Simulation :
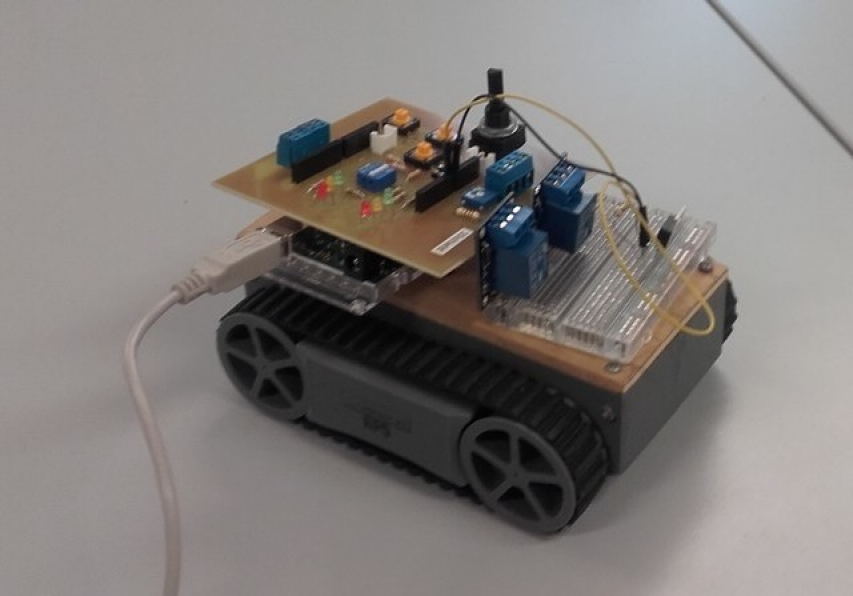
On souhaite piloter un robot en mode va et vient :
La mise en marche est réalisée par BP1, l'arrêt du cycle par BP2
Description du cycle
Marche avant pendant 1s
Arrêt pendant 2s
Marche arrière pendant 1s
Arrêt pendant 3s
Conseil :
Q3. Réaliser le graphe d'état correspondant au fonctionnement
Faire valider, par le professeur, le bon fonctionnement sur le modèle 3D virtuel
Après validation du fonctionnement sur la simulation modifier votre modèle
L'affectation du pilotage des moteurs est la suivante
Entrée | n° broche | Sortie | n°broche |
|---|---|---|---|
bp1 | 2 | Marche Avant (AV) | 9 mettre les inter DIP sur off |
bp2 | 3 | Marche Arrière (AR) | 10 mettre les inter DIP sur off |
led verte | 11 | ||
led rouge | 13 | ||
led orange | 12 |
Q4. Modifier votre graphe d'état pour faire fonctionner la maquette de robot chenille.
Faire valider par l'enseignant
Q5. Proposer une amélioration avec clignotement alterné d'une led verte et d'une led rouge lors du retour du robot à la fin du cycle et un allumage en fonctionnement de la led orange