Visualisation de la commande
Fondamental :
On cherche dans cette partie à déterminer l'influence des paramètres du moteur pas à pas
Nous utiliserons un ESP32 pour piloter le moteur pas à pas.
Cette première expérimentation doit vous permettre de connaitre le rôle des 2 paramètres du pilotage
Méthode :
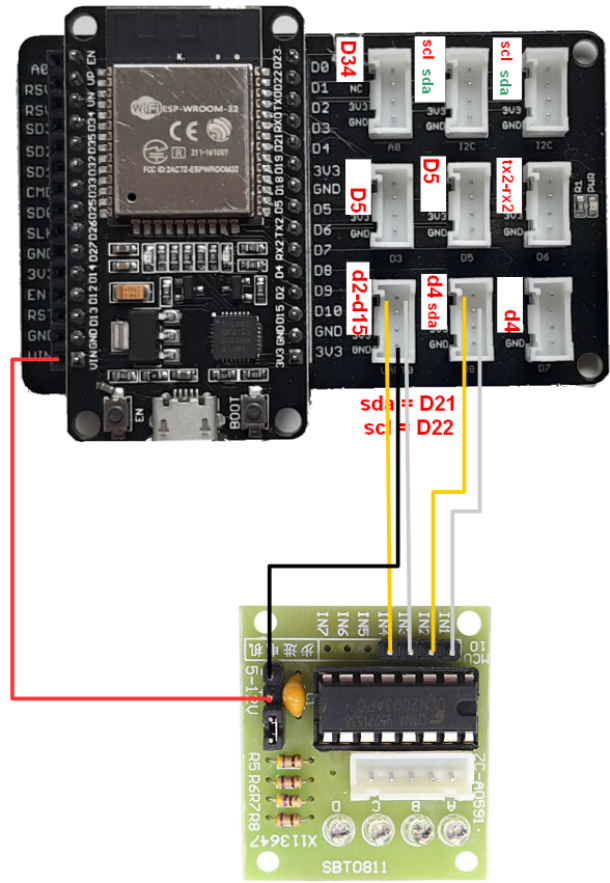
Réaliser le montage suivant SANS brancher le câble USB à l'ordinateur
Faire vérifier le montage par l'enseignant
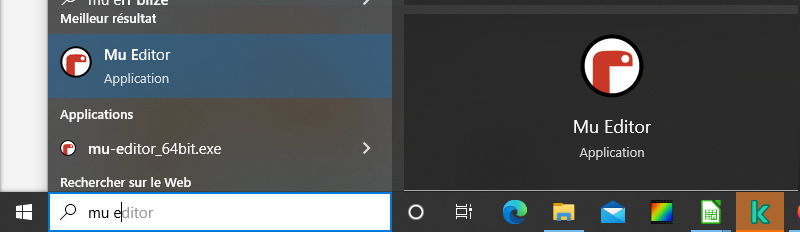
1.lancer le logiciel Mu Editeur
2.Dans le menu de Mu ![]()
3.choisir l'ESP 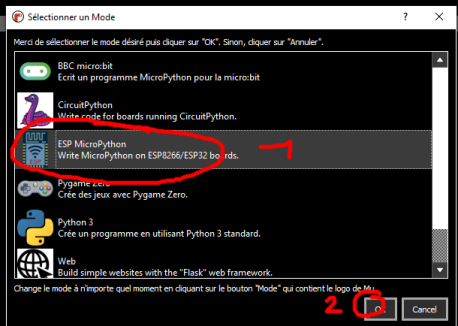
4. Charger le programme ci-dessous dans un nouveau programme![]()
# Programme essai1from pApESP import*
print("essai marche avant grande vitesse")
AVgv(1, 0.002)
5.Télécharger et enregistrer dans le dossier mu de l'ordinateur le fichier py suivant
Fichier à télécharger et enregistrer dans le dossier mu de l'ordinateur
(C:\Users\______\mu_code\)
Remarque le dossier mu de l'ordinateur est dans un répertoire comme sur ce modèle
(C:\Users\______\mu_code\)
Déposer le fichier pApESP.py dans l'ESP (device )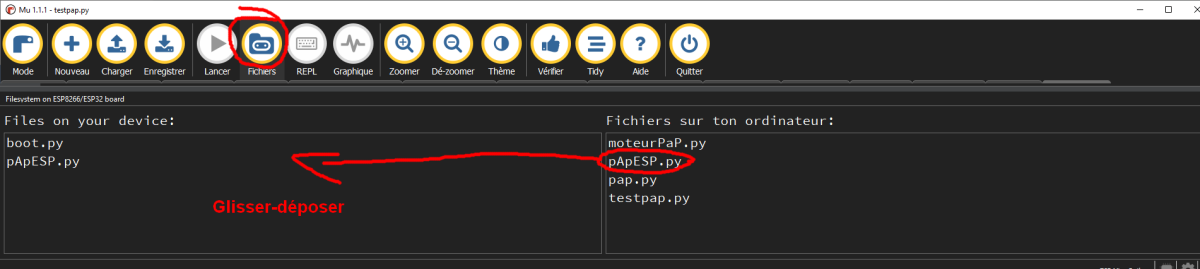
Lancer le programme  (# Programme essai1)
(# Programme essai1)
Observer le fonctionnement du moteur
Relever le nombre de tour et temps de fonctionnement pour les différentes valeur de paramétrage
Conclure sur la fidélité de fonctionnement par rapport à la documentation constructeur
AVgv | (1, 0.002) | (2, 0.002) | (3, 0.002) | (0.1, 0.002) | (1, 0.003) | (1, 0.005) | (1, 0.007) | (1, 0.02) | (1, 0.05) |
nombre de tour(s) | |||||||||
temps de fonctionnement | |||||||||
Vitesse moyenne |
Fondamental :
Proposer et mettre en oeuvre des protocoles pour :
Maîtriser la commande des vitesses et position.
Mesurer la vitesse à vide.
Mesurer le signal de commande