Parallélogramme ORIOR
Schéma cinématique
On donne le schéma cinématique du système à parallélogramme en position basse :
Dans ce schéma, le vérin électrique est modélisé par une liaison pivot glissant.
La tige du vérin (8) est complètement rentrée et les bras (2) et (3) sont horizontaux.
Le point F représente le centre de l'articulation entre la tige du vérin (8) et le bras inférieur (3).
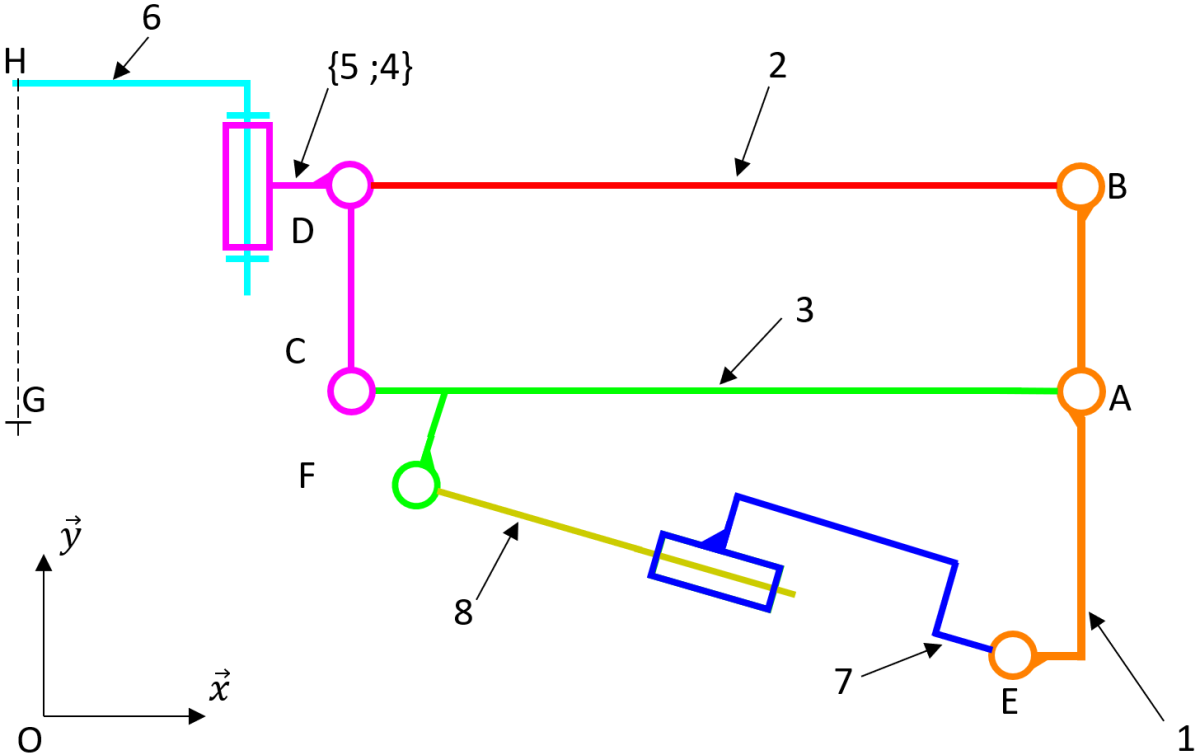
La position de la personne est modélisée par le point G qui représente le centre de gravité de la personne à soulever. Ce point est situé sensiblement au niveau des hanches.
On précise que ce point est situé dans le plan de symétrie \((0,\vec x,\vec y)\) de l'ensemble.
La personne est suspendue par un harnais accroché en H et le segment [HG] sera considéré vertical durant tout le mouvement.
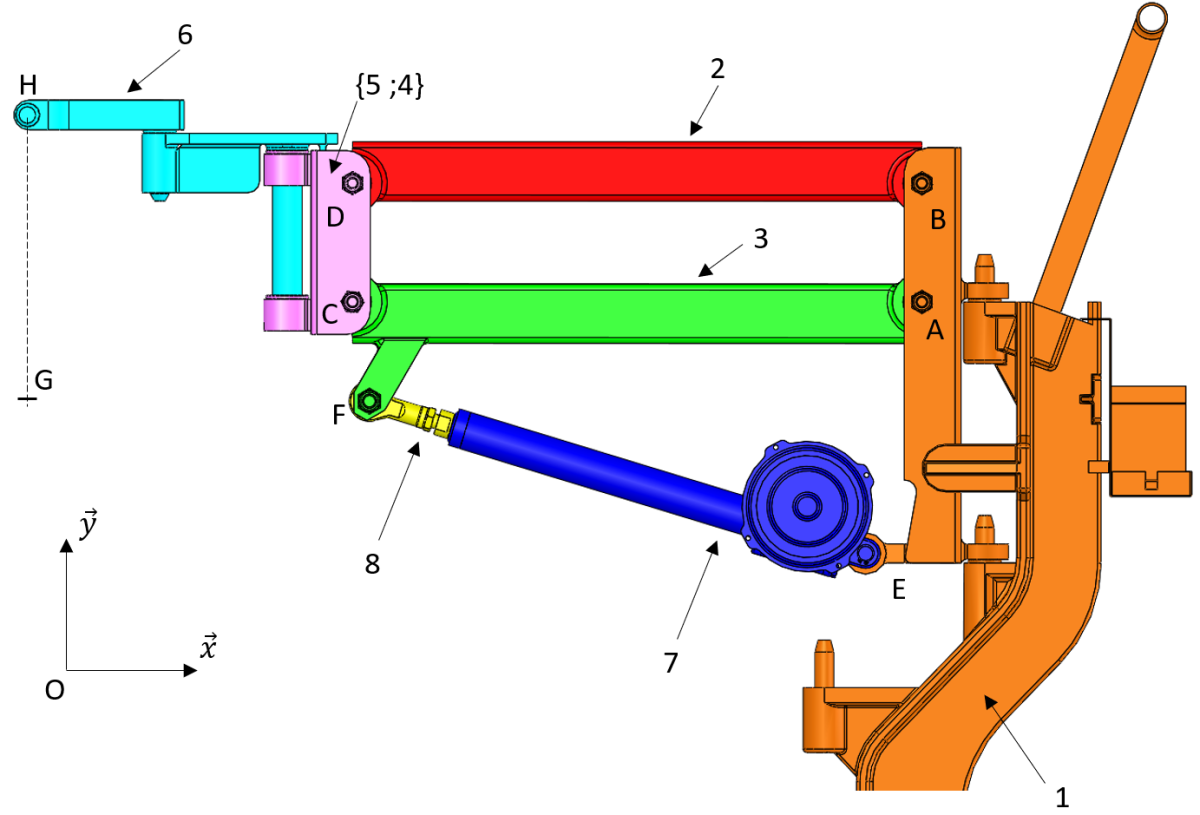
On retrouve la vue de face (vue plane) du mécanisme modélisé sous SolidWorks et correspondant au schéma cinématique ci-contre.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger la vidéo.
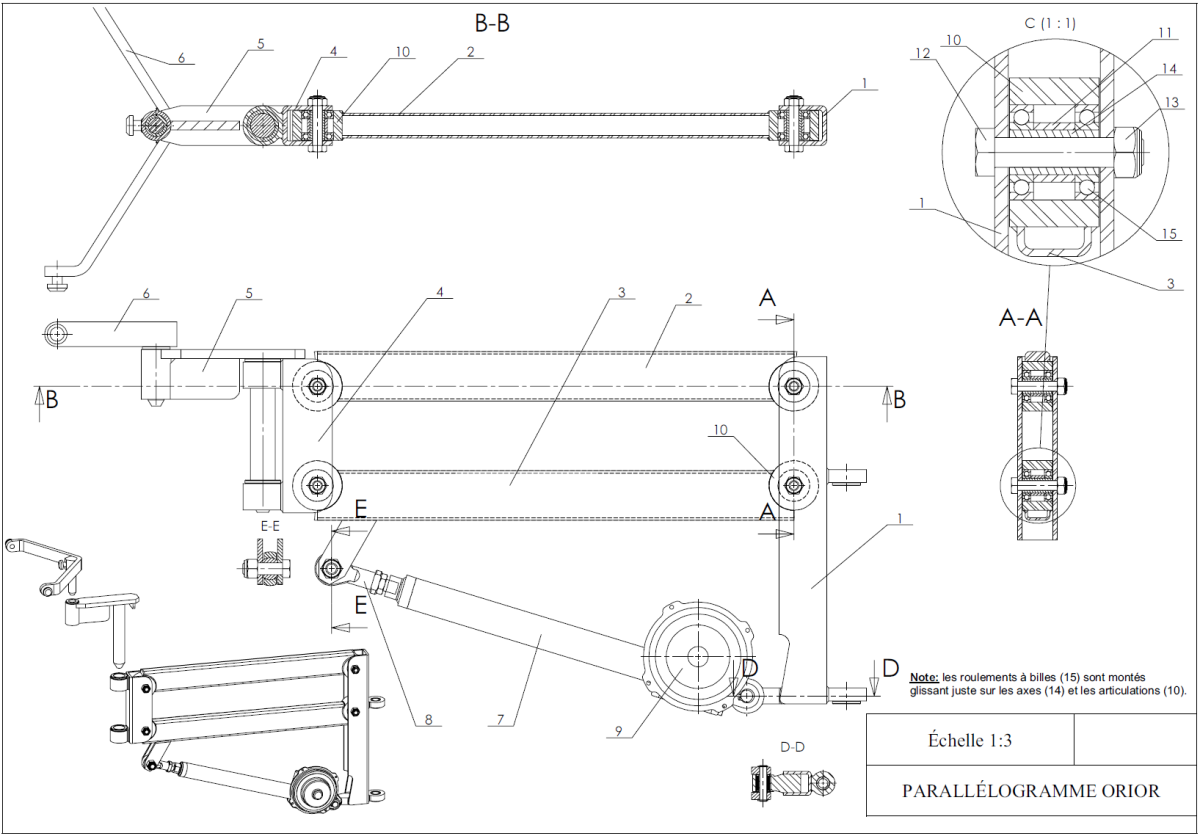
Dessin technique et nomenclature
20 | ||||
19 | ||||
18 | ||||
17 | ||||
16 | ||||
15 | 8 | roulement BC 15-32 SKF | ||
14 | 4 | axe creux | ||
13 | 5 | écrou Nylstop M10 | ||
12 | 5 | vis H M10 - 50 | ||
11 | 4 | entretoise | ||
10 | 4 | articulation | Al Si 13 | |
9 | 1 | moteur CC SKF | 12V CC, plat, IP44 | |
8 | 1 | embout à rotule M12 | ||
7 | 1 | vérin électrique SKF | SKF CAR L 32x200x1FS/D12C | |
6 | 1 | fourche | Al Si 13 | |
5 | 1 | adaptateur de fourche | C35 | |
4 | 1 | support | Al Si 13 | |
3 | 1 | bras inférieur | Al Si 13 | |
2 | 1 | bras supérieur | Al Si 13 | |
1 | 1 | base | Al Si 13 | |
Rep. | Nbre | Désignation | Matière | Observation |
|---|