Chaîne d'information
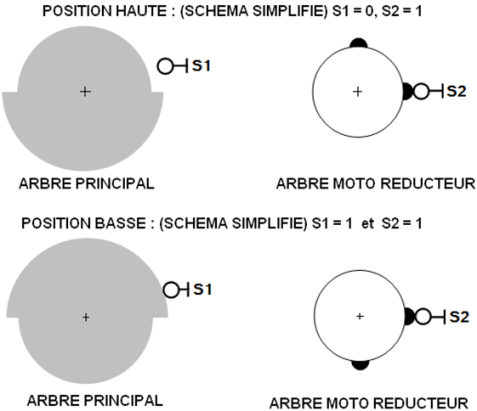
Pour déterminer la position de l'arceau, le système est équipé de deux détecteurs : S1 et S2.
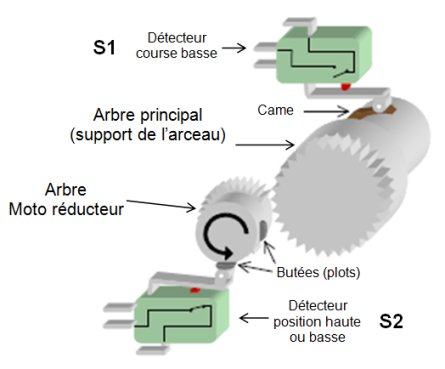
Principe de fonctionnement des détecteurs S1 et S2
S1 permet de déterminer si l'arceau est dans le secteur angulaire bas.
S2 indique que l'arceau est en fin de course (haute ou basse).
Les détecteurs (de même que le moteur) sont reliés à une carte électronique de type ARDUINO UNO. La carte Arduino[1] supporte un shield[2] (carte de puissance Polulu dual MC33926[3] destinée à l'alimentation de deux moteurs à courant continu). Ici une moitié seulement du shield est utilisée.
Le tableau ci-dessous précise les variables (type, adressage,...) d'entrée et de sortie de la chaîne d'information.
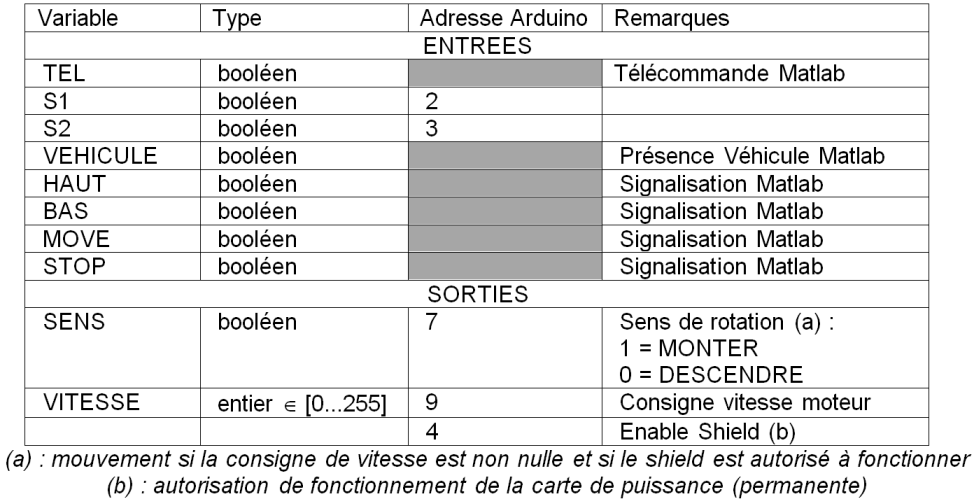
Diagramme de blocs internes – Chaîne d'Information