1. Analyse structurelle statique
1.1. Calibration des capteurs
Calibration du capteur de mesure
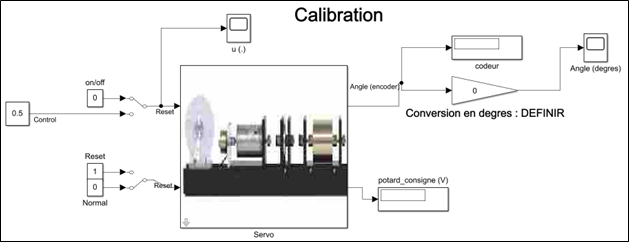
Le codeur angulaire a une résolution de 4096 pas par tour.
Protocole expérimental
Ouvrir le fichier Simulink calibration.slx
Exécuter le programme (attendre car il y a une compilation et un transfert du code vers la cible).
Effectuer une remise à zéro (reset) du compteur en actionnant par un double clic souris, l’entrée Reset (Normal èReset). Puis replacer le contact sur la position Normal.
Tourner à la main l’arbre moteur d’un tour et observer l’affichage de l’indicateur codeur.
En déduire la valeur du gain qui transforme la mesure du codeur (sans dimension) en angle (mesuré en degré).
Calibration du potentiomètre de consigne
Protocole expérimental
Exécuter le programme calibration.slx
Tourner à la main le potentiomètre de consigne d’un tour tout en relevant les valeurs de la tension de sortie potard_consigne
En déduire la fonction qui transforme la position du potentiomètre mesurée en degré en valeur numérique : \(Vc(\theta_c)\)

Entrée : position index (degré) | -180 | -135 | -90 | -45 | 0 | 45 | 90 | 135 | 180 |
|---|---|---|---|---|---|---|---|---|---|
Sortie : V_potard () |
1.2. Relevé de la fonction de transfert statique
Protocole expérimental
Ouvrir maintenant le fichier Simulink Identif_gain_statique.slx
Exécuter le programme (attendre car il y a une compilation et un transfert du code vers la cible).
Pour chaque valeur de commande situé dans le tableau ci-dessous, relevez, lorsque le point de fonctionnement est stabilisé, la vitesse du moteur en tr/min.
Entrée de commande u (volt) | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1 |
|---|---|---|---|---|---|---|---|---|---|
Sortie : \(\omega\) (vitesse en tr/mn) |
|
|
|
|
|
|
|
|
|
A partir du tableau précédent, tracer grâce au tableur la fonction de transfert du système w=f(u).
Cette fonction de transfert est-elle linéaire ?