Prédéterminations
Il s'agit de déterminer le réglage de la boucle de régulation (valeur du coefficient d’action proportionnelle) en fonction d’un comportement souhaité. On détermine le modèle (fonction de transfert en BF) en se servant des résultats obtenus lors du TP n°1 modèle d’ordre 3 décomposé. On étudie également l’influence d’une perturbation sur le système en BF (dans le cas de ce processus c’est la fermeture d’un volet qui intervient à un instant défini).
On envisage un correcteur à action proportionnelle de valeur notée soit \(k\) soit \(S_r=k \, \epsilon=k \, (C-M_T)\)
A partir du modèle obtenu (Modèle d’ordre 2), on envisage donc le schéma-blocs en BF ci-dessous. On note : \(k_0=k\, . \, G_{v0}\) gain statique global, avec \(k\) le coefficient d’action proportionnelle.
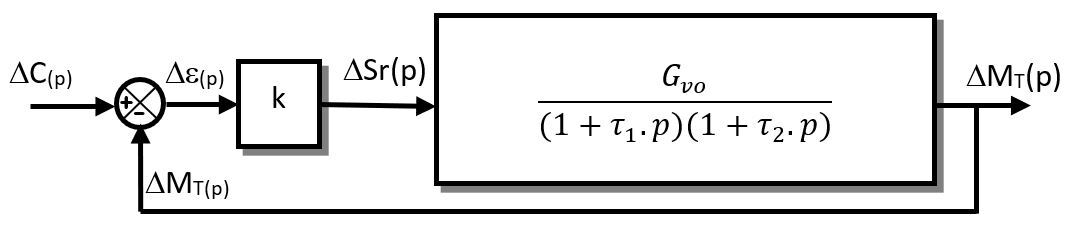
Exprimer la fonction de transfert en boucle ouverte \(O(p)=\dfrac{\Delta M_T(p)}{\Delta \epsilon (p)}\)
Exprimer la fonction de transfert en boucle fermée sous la forme donnée ci-dessous :
\(F(p)=\dfrac{\Delta M_T(p)}{\Delta C (p)}=\dfrac{k_{F}}{1+\dfrac{2\, \xi_F}{\omega_F}p+\dfrac{1}{{\omega_F}^2}p^2}\)
Par identification, en déduire les caractéristiques du système en fonction de \(\tau_1\), \(\tau_2\) et \(k_0\).
On choisit usuellement \(\xi_F = 0,5\).
Indiquer quelle sera la valeur du premier dépassement (en %) et déterminer la valeur de \(k_0\) et la valeur de \(k\) pour avoir un facteur d'amortissement de 0,5.