Influence de l'angle
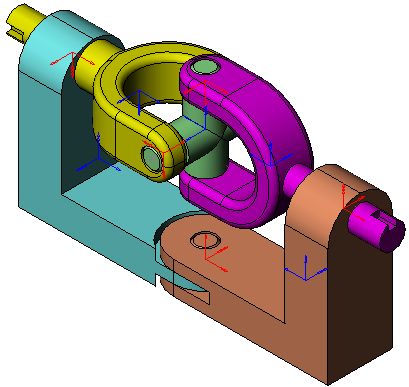
Charger le fichier « Cardan ». Pour ce montage nous allons modifier l’angle du « défaut » pour avoir \(\alpha=25^{\circ}\) pour vérifier l’influence de l’angle d’inclinaison.
Remarque :
La liaison d’entrée est la liaison « Pivot1 » et la liaison de sortie est la liaison « Pivot glissant1 ».
Pour atteindre l'objectif visé il faudra définir:
au niveau de chape 1 une fréquence de rotation constante
au niveau du support 2 une fréquence de rotation nulle pendant un certain temps pour bien montrer l'égalité des fréquences de rotation de la chape 1 et de la chape 2 lorsque que leurs axes coïncident, puis une fréquence de rotation non nulle permettant de faire varier l'angle d'inclinaison de ces 2 axes de 0 à 45°
Données :
Nchape1/support1 = 2 tr/min
Nsupport2/support1 = 0 tr/min 0<t<30s
Nsupport2/support1 = 0.02 tr/min 30<t<300s
Définir la courbe de représentation de la variation de N support2/support1
Lancer l'éditeur de courbes depuis la barre des menus ![]() →
→ ![]() →
→ ![]() .
.
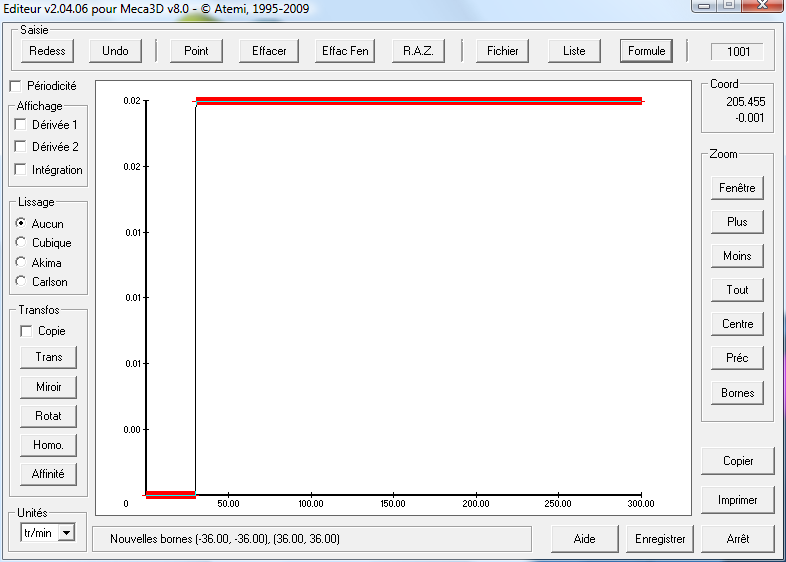
Définir les limites (bornes) des axes X(0 , 300) Y(0 , 0.02)
Définir la loi de variation par 2 formules (x représente la valeur de t)
0<x<30 f(x)=0
30<x<330 f(x)=0.02
Prendre un incrément de 0.3 et enregistrer la courbe.
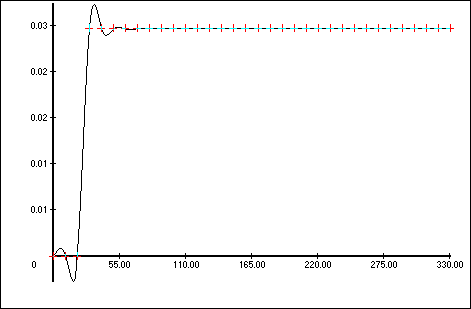
Remarque :
La conception du programme d'édition de courbes impose de définir un nombre important de points pour obtenir une courbe correcte.
Ci-contre même courbe mais avec un incrément 25 fois plus grand.
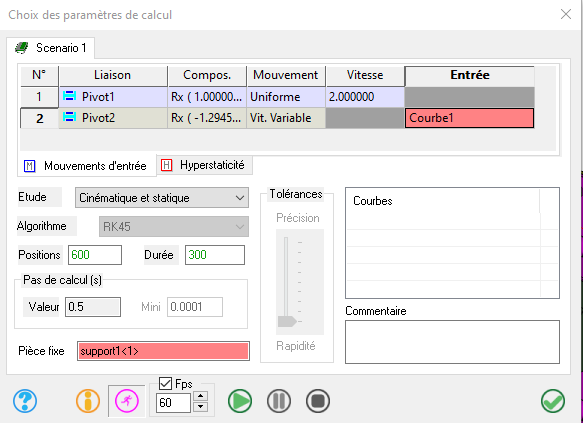
Lancer une étude cinématique
Le système possédant 2 degrés de mobilité , il est donc nécessaire de définir 2 mouvements
Nchape1/support1 type de mouvement → imposé
Nsupport2/support1 type de mouvement → vitesse variable (ouvrir le fichier courbe défini précédemment)
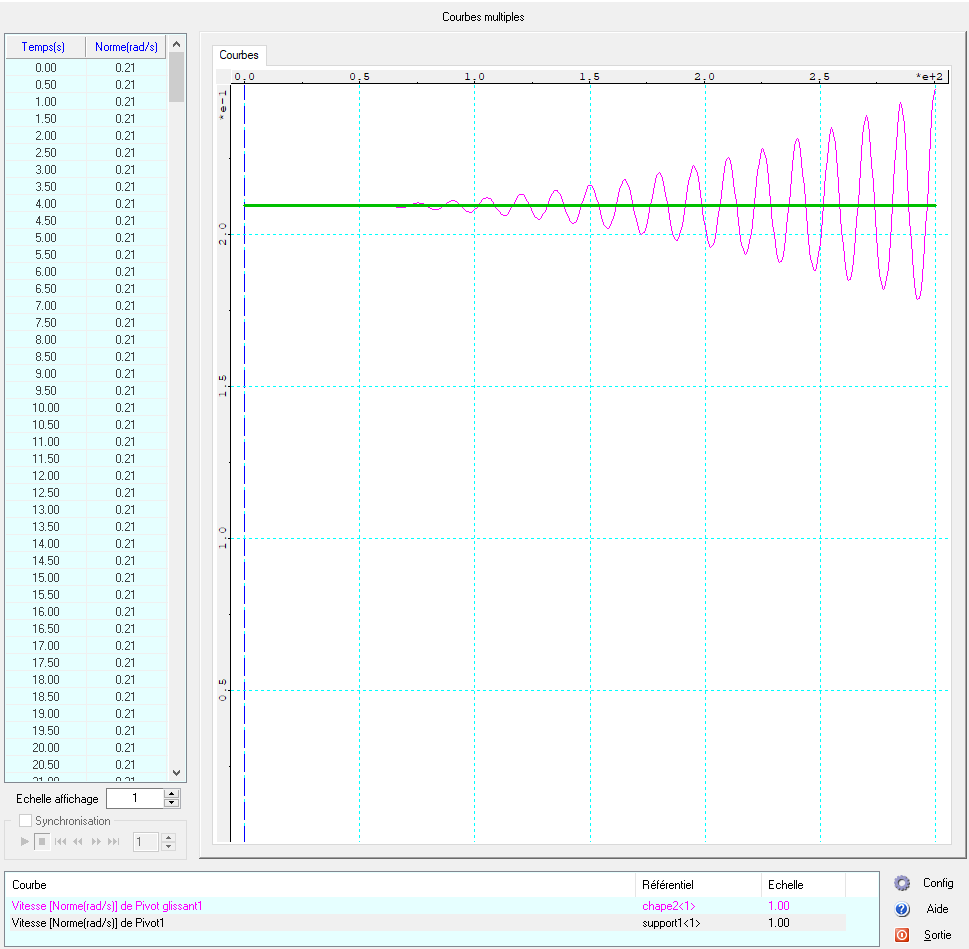
Résultats
On veut faire apparaître sur le même graphe Nchape1/support1 , Nchape2/support2 et Usupport2/support1
Procédure :
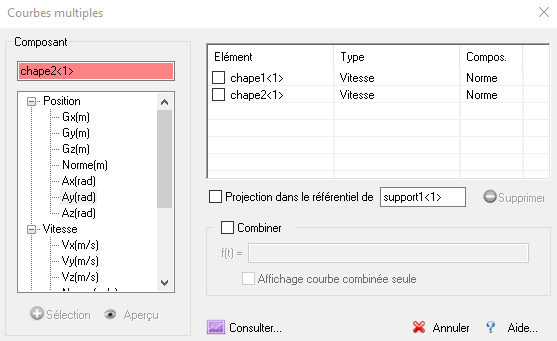
Menu Résultats → Courbes → Multiples
Sélectionner les courbes.
Définir un coefficient (par défaut il est de 1).
Bilan
Etablir un compte rendu à partir des étapes suivantes : Indiquer les défauts de position admissibles pour le joint. Simuler le fonctionnement du mécanisme pour les différentes lois de vitesse de la liaison d’entrée. Relever les courbes de la vitesse de sortie. Comparer avec les courbes de la vitesse d’entrée. Conclure sur l’utilité de ce type de joint.
Faire valider par le professeur.