Exercice : Challenges
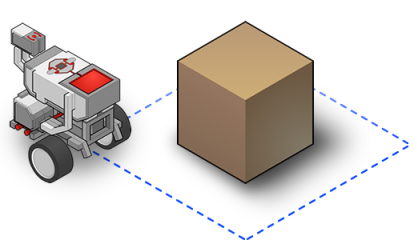
Challenge 1 : La boîte v2.
En utilisant le capteur gyroscopique, vous pouvez programmer votre robot pour effectuer des virages plus précis. Cela signifie que vous pouvez réduire la quantité d'erreur même si vous faites tourner le robot plusieurs fois dans un seul programme.
Programmer le robot de manière à terminer un tour complet autour d'une boîte carrée, en utilisant le capteur gyroscopique pour contrôler l'ensemble de ses virages.
Question
Programmer le robot pour effectuer un tour complet autour d'une boîte, en utilisant le capteur gyroscopique pour contrôler les virages du robot.
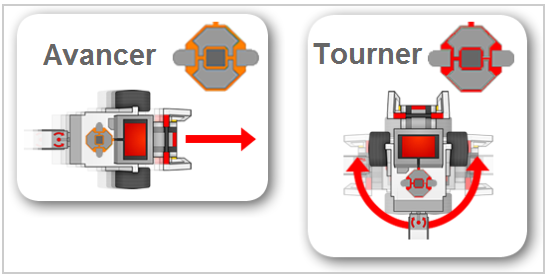
Programmer le robot de telle sorte que la LED soit orange lorsque le robot va de l'avant, et clignote en rouge lorsque le robot tourne.
Indice
Astuce 1: Utiliser un bloc "Témoin d'état de la brique" pour contrôler l'éclairage de la LED  .
.
Indice
Astuce 2: La valeur "0" sur le capteur gyroscopique est toujours par rapport à sa position d'origine. Si le premier virage a fait passer la valeur de "0°" à "90°", quelle sera la nouvelle valeur après le deuxième virage ?
Indice
Astuce 3: Le second virage fera tourner le robot jusqu'à ce que le capteur gyroscopique lise la valeur de 180 degrés (90 + 90). Qu'en sera-t-il du troisième et du quatrième virage?
Indice
Astuce 4:
Le troisième virage fera tourner le robot jusqu'à ce que le capteur gyroscopique soit sur la valeur 270 degrés, et le quatrième virage jusqu'à ce qu'il (le capteur gyroscopique) ait atteint 360°.
FAIRE VALIDER par le professeur avant de passer à la suite.
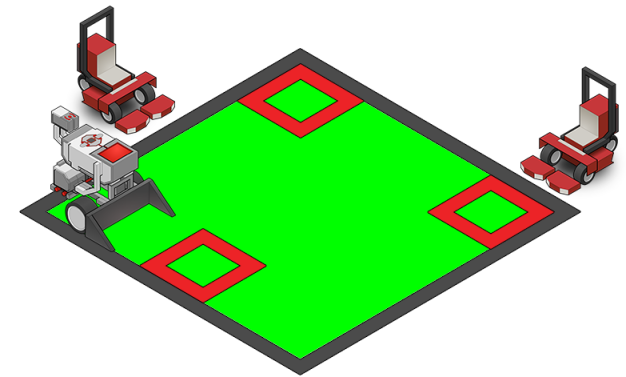
Challenge tondeuse à gazon
Dans ce défi, vous allez programmer votre robot EV3 à se déplacer sur l'ensemble du terrain. Le robot peut librement manœuvrer dans les lignes droites, mais doit utiliser le capteur gyroscopique pour tourner.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
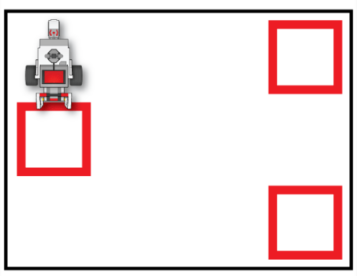
Dans ce défi, vous allez programmer votre robot EV3 pour effacer ou nettoyer la totalité de l'aire du terrain. Le robot est capable de se déplacer librement dans les lignes droites, en utilisant une méthode que vous voulez. Cependant, il y a trois zones de boue marqués sur le plateau de jeu. En tournant dans l'une de ces zones, le robot doit être ramassé à la main, et placée vers le bas.
Règles et Procedures:
Le robot doit vider le plateau des marques ou des pièces pour compléter sa mission.
Si une partie du robot se trouve dans la zone de boue (carrés rouges) à tout moment pendant un virage, il doit être ramassé et placé vers le bas, au plus près du même endroit et en face autant que possible.
Utilisez des facteurs de correction pour compenser les imprécisions du capteur et être sûr que le terrain soit bien couvert.
Question
Programmer le robot pour se déplacer sur l'ensemble du plateau de jeu.
Tous les virages doivent être contrôlés par le capteur gyroscopique.
Le terrain dispose de trois zones de boue à des endroits spécifiés.
Indice
Parce que les roues du robot continuent de tourner dans l'air quand il est ramassé, les commandes "Rotations" ou "Secondes" ne seront pas fiables pour les virages dans la boue.
Indice
Le capteur gyroscopique réagit uniquement à la rotation du corps du robot, et n'est pas affecté par des interruptions comme lorsqu'on le ramasse.
Indice
Il est peu probable que l'effaceur agisse parfaitement, en particulier à proximité des bords. Planifiez donc le trajet de votre robot en conséquence.
Indice
Utilisez un facteur de correction pour compenser le fait que le capteur gyroscopique n'atteindra pas 90 degrés lorsque le robot aura tourné de 90 degrés.
FAIRE VALIDER par le professeur avant de passer à la suite.