Bilan : Capteur gyroscopique
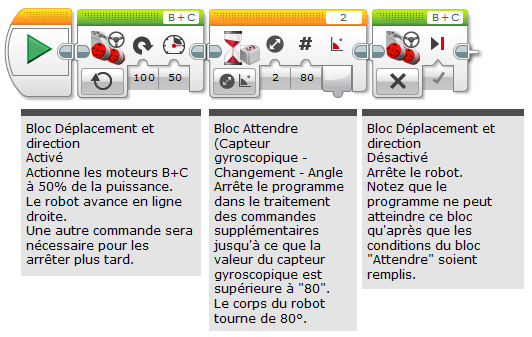
Analyse du programme : Tourner d'un angle précis (90 degrés)
Le programme ci-dessous est issu du programme de la leçon pour tourner d'un angle précis.
Les moteurs du robot tournent dans des sens opposés pour créer un mouvement de rotation, puis attend que la valeur lue par le capteur gyroscopique change de plus de 80 degrés. Quand cela se produit, le programme arrête les moteurs et le robot s'arrête.
Ce programme fait tourner le robot d'environ 90 degrés vers la droite. La valeur saisie pour le capteur (80 degrés) est plus petite que la valeur souhaitée pour compenser la tendance du robot à "survirer".
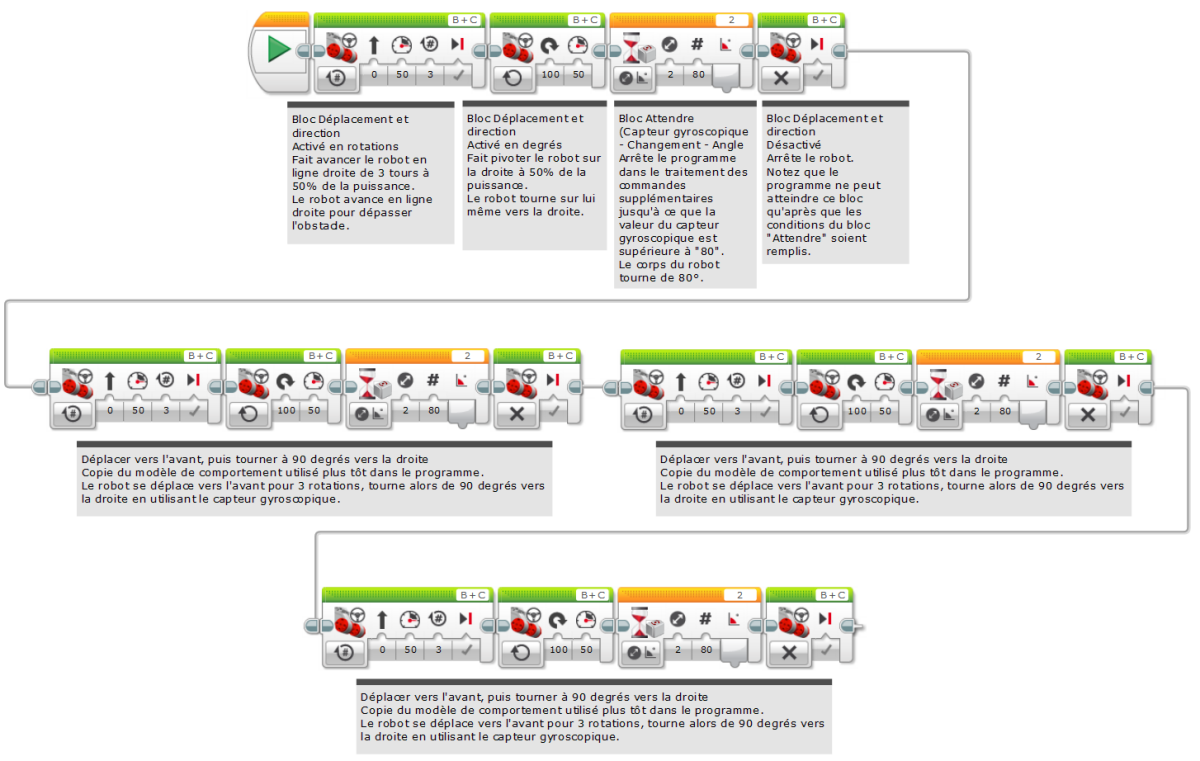
Analyse du programme : La boîte
Le programme ci-dessous est un exemple de solution pour le mini-défi : la boîte, utilisant le capteur gyroscopique pour effectuer les quatre tours.
Chaque côté de la boîte utilise un comportement similaire: Aller de l'avant sur une certaine distance, puis tourner à 90 degrés vers la droite.
Chaque virage à droite est réalisée en utilisant "tourner d'un angle précis" : Faire tourner les moteurs, attendre que le capteur gyroscopique détecte un changement de 80 degrés, puis arrêter les moteurs.