Propulsion
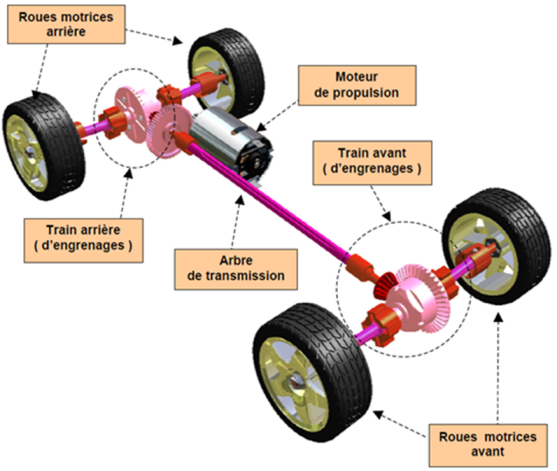
Le véhicule est à quatre roues motrices : les deux roues avant et les deux roues arrière sont entraînées en rotation par le moteur à courant continu.
Les roues ont un diamètre de 65 mm.
L'arbre de sortie du moteur est solidaire de la roue menante du réducteur à engrenages droits (Z1 = 19 dents) tandis que la roue menée (Z2 = 61 dents) entraîne l'arbre de transmission qui court d'un bout à l'autre du véhicule et permet d'entraîner, à la même vitesse (il n'y a pas de différentiel central) les trains avant et arrière.
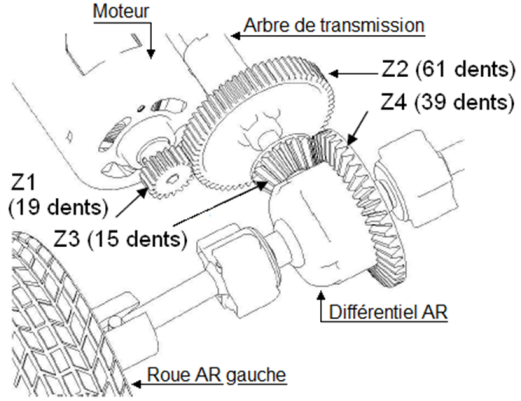
A l'entrée du différentiel, un dispositif à engrenages concourants (Z3 = 15 dents, Z4 = 39 dents) permet d'obtenir un renvoi d'angle (l'arbre de transmission et le train forment un angle droit).
Sur chaque train, le différentiel permet de faire en sorte que la vitesse de rotation de la roue placée à l'extérieur du virage tourne légèrement plus vite que celle placée à l'intérieur.
En ligne droite, les deux roues tournent évidemment à la même vitesse.
La constitution interne du différentiel apparaît sur l'écorché ci-contre.
Les roues dentées rouges tournent chacune à la vitesse de la roue associée.
Les satellites (en violet) ne tournent sur eux-mêmes que dans le cas d'une trajectoire courbe.

D'un point de vue électrique, le moteur est alimenté sous une tension modulée, fonction de la position du levier avant arrière (AV_AR) et obtenue à partir :
de la tension fixe de la batterie (7.2V)
d'un variateur de vitesse (hacheur à pont en H) qui joue sur le rapport cyclique d'un signal rectangulaire 0...7.2V (ou -7.2V ...0 selon le sens de déplacement)
La figure suivante montre l'agencement des différents blocs fonctionnels pertinents du point de vue d'un déplacement en ligne droite. En commentaire est précisée la fonction de chaque bloc (ALIMENTER,...).