Pilotage du moteur
Objectif : Vérifier le fonctionnement du moteur
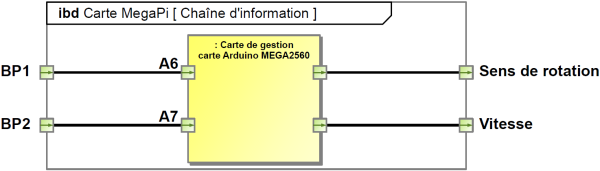
Nous allons utiliser deux boutons poussoirs pour vérifier le fonctionnement du moteur :
BP1 : sens horaire de rotation
BP2 : sens anti-horaire de rotation
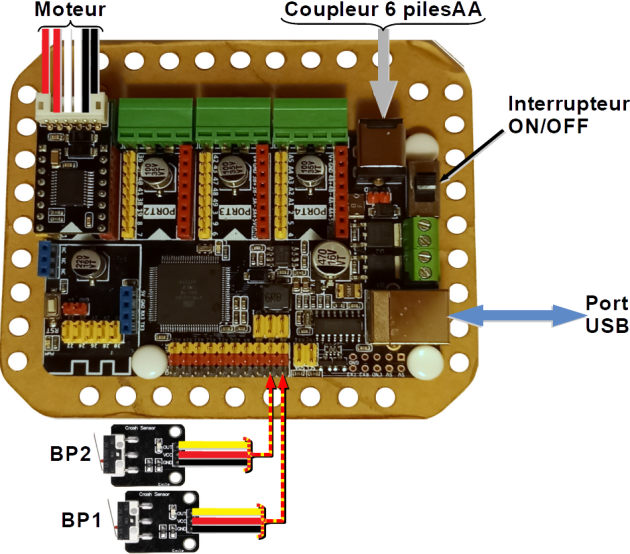
![]() Réaliser le câblage de la photo suivante :
Réaliser le câblage de la photo suivante :
Remarques :
La broche « OUT » du bouton poussoir reliée à une borne JAUNE de la carte.
La broche « VCC » du bouton poussoir reliée à une borne ROUGE de la carte.
La broche « GND » du bouton poussoir reliée à une borne NOIRE de la carte.
 Faire vérifier votre câblage au professeur avant de mettre les piles et de relier la carte au PC. [pdf]
Faire vérifier votre câblage au professeur avant de mettre les piles et de relier la carte au PC. [pdf]
![]() Ouvrir le programme « Arduino »
Ouvrir le programme « Arduino » ![]()
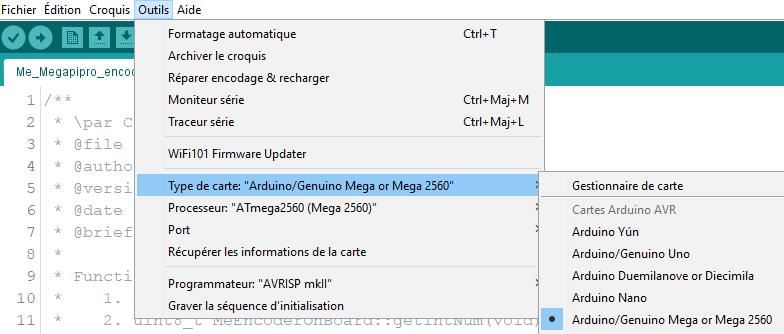
![]() Aller dans le menu « Outils - Type de carte » et choisir « Arduino/Genuino Mega or Mega2560 ».
Aller dans le menu « Outils - Type de carte » et choisir « Arduino/Genuino Mega or Mega2560 ».
![]() Raccorder votre carte à votre ordinateur avec le câble USB fourni.
Raccorder votre carte à votre ordinateur avec le câble USB fourni.
![]() Aller dans le menu « Outils - Port » et choisir le port USB où votre carte est reliée.
Aller dans le menu « Outils - Port » et choisir le port USB où votre carte est reliée.
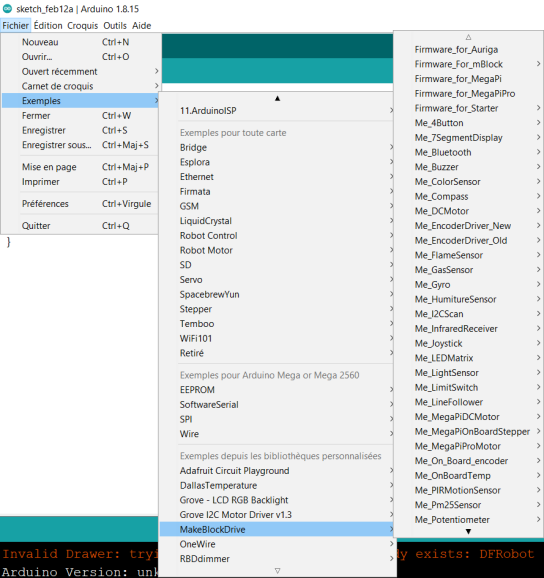
![]() Aller dans le menu « Fichier - Exemples » et vérifier la présence du répertoire « MakeBlockDrive ».
Aller dans le menu « Fichier - Exemples » et vérifier la présence du répertoire « MakeBlockDrive ».
En cas d'absence, charger la bibliothèque « MeMegaPi.h »
![]() Saisir le programme suivant.
Saisir le programme suivant.
/** BP1; le moteur tourne dans un sens ; BP2; le moteur tourne dans l'autre sens ; */MeMegaPiDCMotor motor1(PORT1B);
uint8_t motorSpeed = 100; // vitesse de 0 à 255
const int BP_1 = A6;
const int BP_2 = A7;
int BP1 = 0;// variable pour lire etat BP 1 = 0 si appuyé
int BP2 =0;// variable pour lire etat BP 2 = 0 si appuyé
void setup()
{pinMode(BP_1,INPUT_PULLUP);// broches en entrées
pinMode(BP_2,INPUT_PULLUP);
}
void loop()
{BP1 =digitalRead(BP_1); // lecture des entrées des BP
BP2 =digitalRead(BP_2);
if(BP1==LOW) { // BP1 appuyé
motor1.run (100);
delay(200);
}
else motor1.stop();
if(BP2==LOW) { // BP2 appuyé
motor1.run (-100);
delay(200);
}
else motor1.stop();
}
![]() Téléverser votre programme dans la carte
Téléverser votre programme dans la carte ![]() .
.
![]() FAIRE VALIDER le fonctionnement par le professeur (ne pas oublier de mettre les 6 piles AA et de mettre l'interrupteur sur ON)
FAIRE VALIDER le fonctionnement par le professeur (ne pas oublier de mettre les 6 piles AA et de mettre l'interrupteur sur ON)