Motorisation de la casquette
L'activité du groupe consiste à faire le choix du moteur de la casquette, de préciser les valeurs de cette partie de la chaîne de puissance.

Travail à faire :
On se place dans la situation d'une maquette ; les valeurs calculées seront à revoir à la hausse pour un système réel.
1- Dimensionnement du motoréducteur
Le choix de cette solution technique, qui vous est imposée pour la suite du travail, permet de valider une solution classique et de vérifier des calculs.
Données :
La vitesse de déplacement linéaire désirée de la casquette est de 2 m·min-1.
La longueur de déplacement de la casquette est de 60 mm.
Le diamètre D du pignon moteur est de 8 mm.
![]() CALCULER le temps de déploiement de la casquette en minutes puis en secondes sachant que la course de celle-ci est de 6 cm.
CALCULER le temps de déploiement de la casquette en minutes puis en secondes sachant que la course de celle-ci est de 6 cm.
![]() CALCULER la fréquence de rotation du moteur (Nmot) en tr·min-1.
CALCULER la fréquence de rotation du moteur (Nmot) en tr·min-1.
![]() Formule : V (m·min-1) = \(\pi\) x D (m) x Nmot (tr·min-1)
Formule : V (m·min-1) = \(\pi\) x D (m) x Nmot (tr·min-1)
![]() CALCULER la vitesse angulaire ω en rad·s-1.
CALCULER la vitesse angulaire ω en rad·s-1.
Sachant que la force nécessaire pour déplacer la casquette est de 22 N.
![]() CALCULER la puissance utile nécessaire Pu en sortie de l'adaptateur.
CALCULER la puissance utile nécessaire Pu en sortie de l'adaptateur.
![]() CALCULER la puissance mécanique de rotation nécessaire Pr en sortie du motoréducteur ; CALCULER alors le couple nécessaire C en N.m puis en g.cm. (1N équivaut à 100 g et 1 m = 100 cm).
CALCULER la puissance mécanique de rotation nécessaire Pr en sortie du motoréducteur ; CALCULER alors le couple nécessaire C en N.m puis en g.cm. (1N équivaut à 100 g et 1 m = 100 cm).
![]() CALCULER la puissance électrique Pe_mot en entrée du motoréducteur.
CALCULER la puissance électrique Pe_mot en entrée du motoréducteur.
2 - Choix du type de motoréducteur et du modèle
2-1 - COMPARER les 3 types de moteur électrique suivant : moteur à courant continu, moteur brushless, moteur asynchrone .
INDIQUER pour chacun d'eux dans un tableau :
Le courant est alternatif ou continu
Le type d'application
Les avantages et les inconvénients
2-2- CHOISIR un moteur réducteur dans la liste suivante [pdf] qui satisfait les contraintes (Nmot ±1 tr·min-1 ; Cmot >= C). RÉPERTORIER leurs caractéristiques dans un tableau. FAIRE un choix argumenté.

3 - Étude des panneaux photovoltaïques
![]() CALCULER la puissance électrique nécessaire en sortie des panneaux.
CALCULER la puissance électrique nécessaire en sortie des panneaux.
![]() TROUVER un modèle de panneau solaire qui conviendrai pour cette maquette. PRÉPARER son bon de commande : Fournisseur ; référence ; prix unitaire HT ; quantité ; prix total HT ; prix total TTC
TROUVER un modèle de panneau solaire qui conviendrai pour cette maquette. PRÉPARER son bon de commande : Fournisseur ; référence ; prix unitaire HT ; quantité ; prix total HT ; prix total TTC
![]() VÉRIFIER que votre panneau fournisse bien 12V minimum, sinon calculer le total de panneaux minimum nécessaire.
VÉRIFIER que votre panneau fournisse bien 12V minimum, sinon calculer le total de panneaux minimum nécessaire.

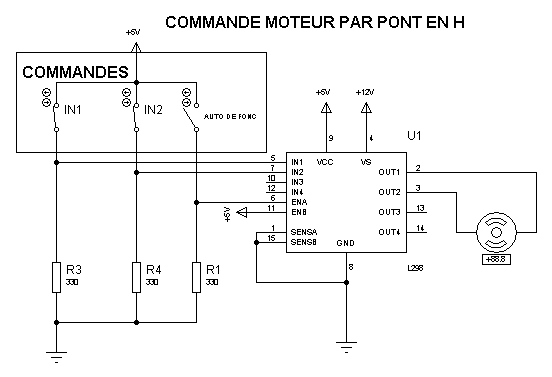
4 - Simulation de la commande du moteur
La commande du moteur va être réalisée par un pont "en H".
S'il n'est pas présent, copier / coller le dossier Proteus 7.4 sur votre bureau. Dans Proteus7.4\BIN ouvrir ISIS ![]() .
.
![]() FAIREOUVRIR ("Open Design") et CHOISIR MoteurCommandeCC
FAIREOUVRIR ("Open Design") et CHOISIR MoteurCommandeCC
![]() LANCER la simulation en bas à gauche et AGIR sur les interrupteurs pour observer le fonctionnement du moteur.
LANCER la simulation en bas à gauche et AGIR sur les interrupteurs pour observer le fonctionnement du moteur.
![]() RÉALISER un tableau de fonctionnement selon le modèle suivant :
RÉALISER un tableau de fonctionnement selon le modèle suivant :
Autorisation de fonctionnement | IN1 | IN2 | État du moteur (arrêt, sens horaire, anti-horaire) |
|---|---|---|---|
0 | 0 | 0 | Arrêt |
0 | 0 | 1 | |
0 | 1 | 0 | |
0 | 1 | 1 | |
1 | 0 | 0 | |
1 | 0 | 1 | |
1 | 1 | 0 | |
1 | 1 | 1 |
etc...
Niveau logique « 0 » (carré bleu) : interrupteur ouvert
Niveau logique « 1 » (carré rouge) : interrupteur fermé.
Si Autorisation de fonctionnement = 1 quelle est la combinaison IN1 IN2 qui permet la rotation horaire ? anti-horaire ?
![]() DONNER un exemple de fonctionnement pour la commande de la casquette.
DONNER un exemple de fonctionnement pour la commande de la casquette.
PRÉSENTER ce travail dans votre diaporama en exposant votre démarche (séance 6).