2) Arrêt sur détection de vide
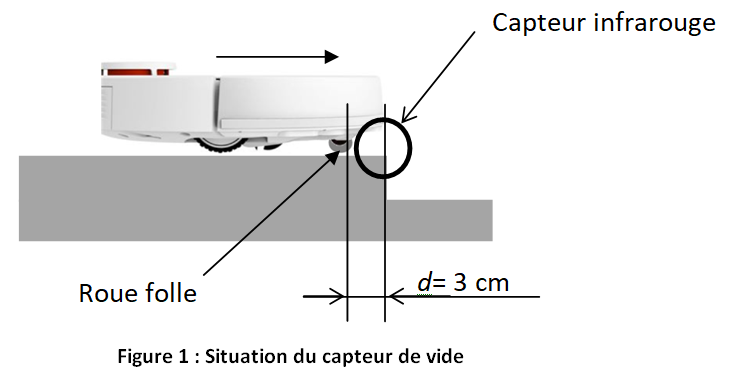
Afin de répondre à la fonction technique « détecter le vide » du robot aspirateur, un capteur infrarouge a été placé sous l’avant du robot. Ce capteur, constitué d’un émetteur et d’un récepteur, informe la carte électronique que le robot rencontre le vide (une marche d’escalier par exemple).
Le robot étant capable de détecter le vide, il faut à présent évaluer la distance d’arrêt du robot en fonction de sa vitesse de déplacement, une fois qu’il en a reçu l’ordre.
Pour ce faire, il est possible de s’appuyer sur le résultat d’une étude expérimentale. Le robot a été commandé pour un déplacement à vitesse constante. Puis, à un instant donné, l’alimentation du moteur a été coupée. Le mouvement résultant se décompose en quatre phases, visibles sur la figure 2 ci-dessous.
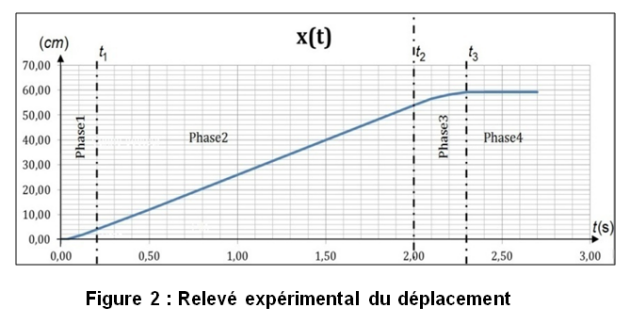
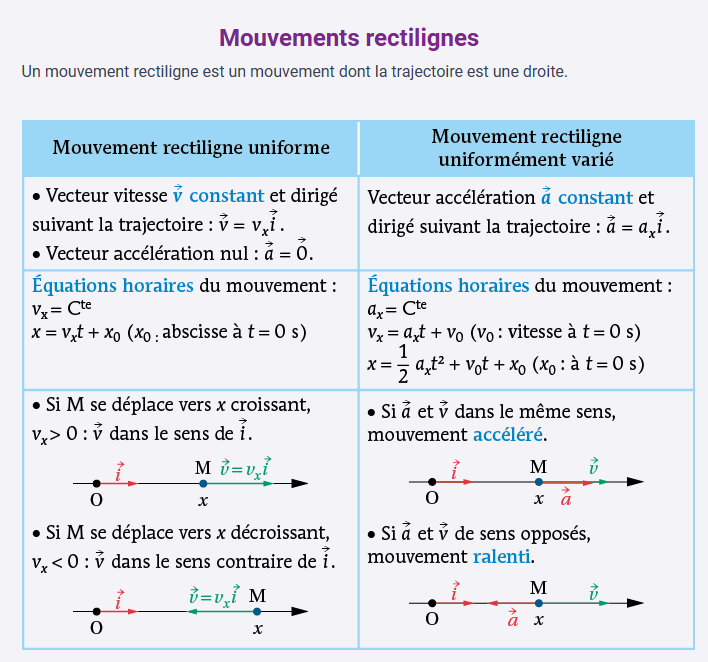
Q3/Donner le nom du type de mouvement du robot pour chacune des quatre phases.
Phase 1 :
Phase 2 :
Phase 3 :
Phase 4 :
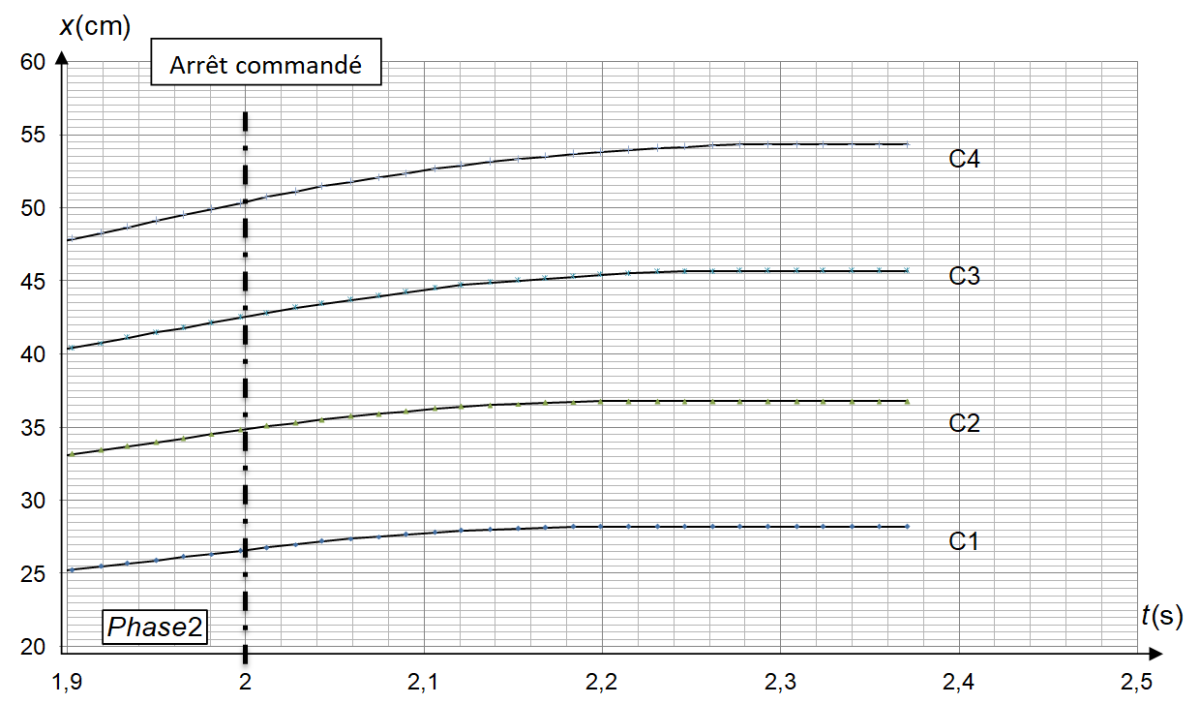
La figure 3 présente les résultats de mesures de position du robot obtenues pour plusieurs vitesses de déplacement , et un arrêt commandé au bout de 2 s.
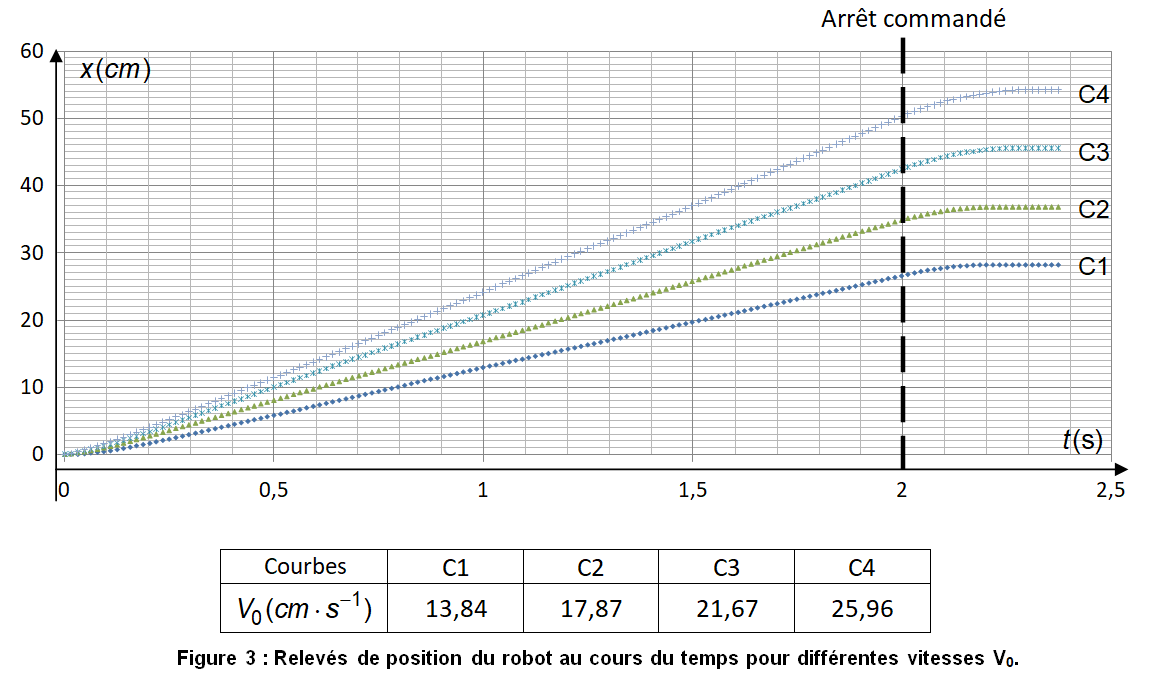
La distance d’arrêt du robot ne doit pas dépasser la distance d entre le capteur et la roue folle (voir figure 1), afin qu’il ne bascule pas dans le vide malgré la détection. Ceci permet de définir la vitesse de déplacement V0 maximale admissible.
Q4/ Sur les courbes ci-après, DETERMINER graphiquement (faire apparaître les constructions) les valeurs de la distance d’arrêt Delta X = X3 - X2 pour les courbes C1 à C4.
Remarque :
X2 : Position en cm du robot à t = 2s
X3 : Position en cm du robot à l’arrêt
Q5/ COMPLETER en conséquence le tableau de Delta X = X3 - X2 en fonction de la vitesse .
Tableau de Delta X = X3 - X2 en fonction de la vitesse :
Q6/ DONNER la vitesse V0 à ne pas dépasser pour que le robot ne chute pas dans les escaliers.